�о��ˆT�_�l�߾���3D��ӡ�͈����������Ƅ�С��ܛ�C���˲��i�������Π�
�r�g��2024-06-17 10:07 ��Դ���ϘO�� ���ߣ�admin ��x����
2024��6��16�գ����Ա����_���{������W���о��ˆT�_�l��һ��������ܛҺ���������������ڿ��ƺ�Ȳ���һ����ܛ�C���˵�׃�κ��\�ӡ��о��ˆT߀�C����ԓ���g���c�Π�ӛ���������ʹ�ã�ʹ�Ñ��܉͌�ܛ�C�����i���������Π��������Ҫ�֏͵�ԭʼ�Π

���͈������ӱ�����ܛ�C���ˡ��DƬ��Դ�������_���{������W Jie Yin
���P�о����}�顰�����Π�ӛ��Ч����ȫ 3D
��ӡ��ܛҺ��������������׃�κͲ�������Փ�ı��l���ڡ����M���ϡ��ڿ��ϡ�ԓՓ���ɱ����_���{������Wǰ��ʿ����ҫ�I�������_���{������W��ʿ���о��T�wҫ������Լ������_���{������W��ʿ���R���ܹ�ͬ����ԓ헹����õ����������ҿƌW�����
2126072 �� 2329674 ̖�Y����

Փ��朽ӣ�https://onlinelibrary.wiley.com/doi/full/10.1002/adma.202402517
ԓՓ�ĵ�ͨӍ���ߡ������_���{������W�Cе�c���պ��칤�̸����� Jie Yin
�f������ܛ�C���˼��g���S�������I���пɞ飬���OӋ��ܛ�C����СҎģ�\�ӵĈ������s�O�������ԡ��҂��ķ����������۵Ķ���� 3D
��ӡ���g���Π�ӛ���ۺ���턓���߶ȵ�ܛ��������ʹ�҂��܉���Ʒdz�С��ܛ�C���ˣ��Ķ����F��ɫ�Ŀ��ƺ;����ȡ���
�¼��g��ه�������ɃɌӽM�ɵ�ܛ�C���ˡ���һ����ʹ�� 3D ��ӡ���g��������Ծۺ�����������wͨ���D���������|����؞�����ϵķdz�С�Ĺ��ӡ��ڶ����������Π�ӛ���ۺ��������֮��ܛ�C����ֻ�� 0.8 ������
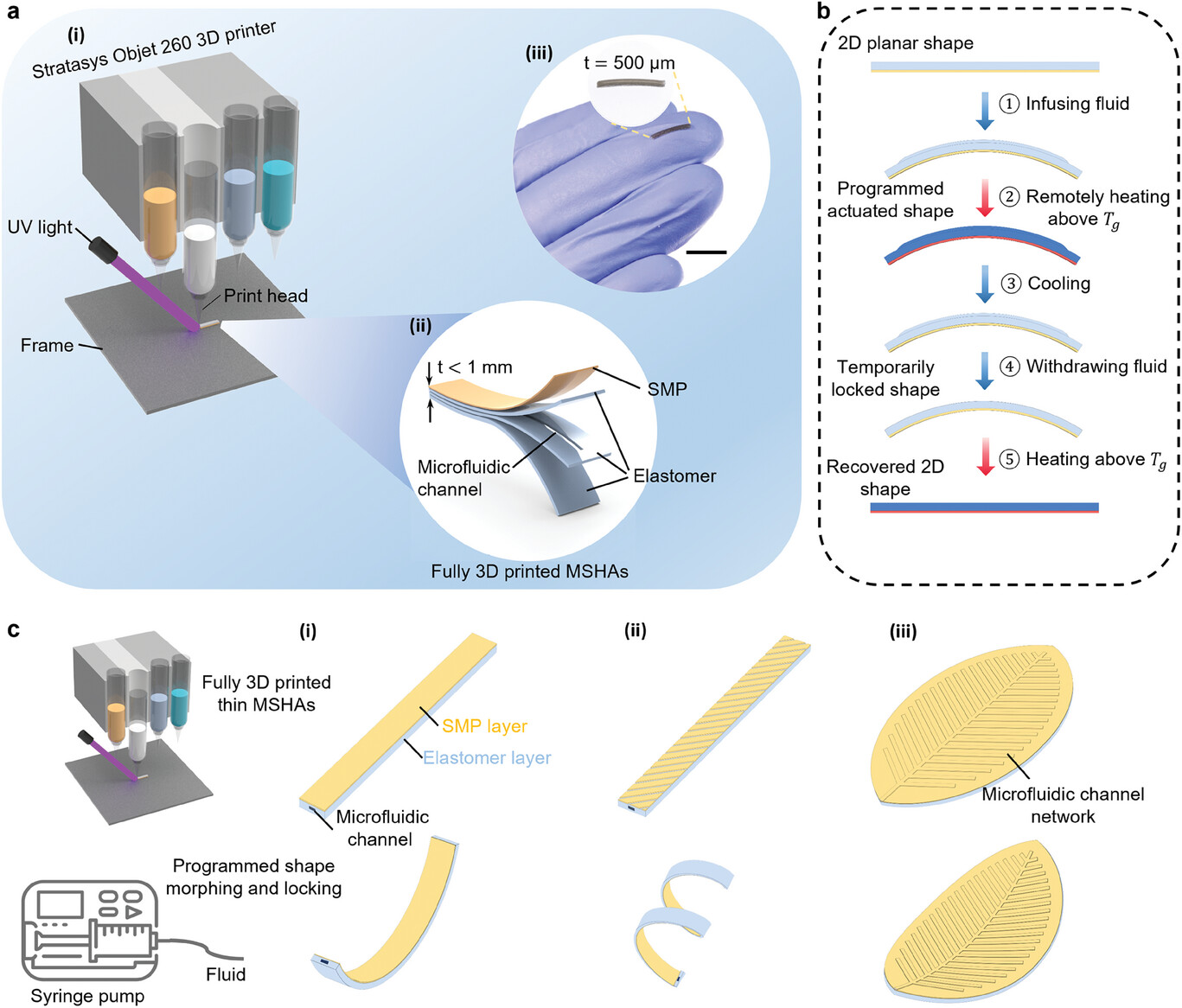
���c SME ���������Π�׃�κ��Π��i����ȫ 3D ��ӡ�́�����ܛҺ�������� (MSHA) ��ʾ��D
ͨ�^�����w�������wͨ�����Ñ����Ԯa��Һ������ʹܛ�C�����ƄӲ���׃�Π���wͨ���ĈD��������ܛ�C���˵��\�Ӻ��Π�׃�������oՓ�Ǐ�����Ť��߀�����������⣬ע������w����ע���ٶȿ�����ܛ�C���˵��Ƅ��ٶȺ�ʩ�ӵ�������
����Ñ�ϣ�������Y��ܛ�C���˵��Π��������ʩ���m�ȵğ�����64C ��
147F����Ȼ���C���˶̕���s���@�ӿ��Է�ֹܛ�C���˻֏͵���ԭʼ�Π��ʹ�����wͨ���е�Һ�w�����֮��Ҳ����ˡ�����Ñ���ܛ�C���˻֏���ԭʼ�Π����ֻ���ڳ��Һ�w���ٴμӟᣬ�C���˾͕��֏͵���ԭʼ���á�
ԓՓ�ĵĹ�ͬ��Ҫ���ߡ������_���{������Wǰ��ʿ�� Yinding Chi
�f�������@���һ���P�I�������{�Π�ӛ���������ڰ������wͨ���Čӵĺ�ȡ�����Ҫ�Π�ӛ��������Ա���ʩ�������ĉ����r����������������ʹܛ�C���˼�ʹ�ډ���������Ҳ�ܱ������Π��
������ʾԓ���g���о��ˆT������һ��ܛ�C���ˡ��A���������܉�ʰȡС���w���о��ˆTʩ��Һ����ʹ�A�����A�o���w��ͨ�^�ӟᣬ�о��ˆT�܉A�����̶��ڡ��]�ϡ�λ�ã���ʹ��ጷ�Һ�������ĉ�����Ҳ����ˡ�Ȼ������ƄӊA����������A�ֵ����w�\�͵���λ�ã���Ȼ���о��ˆT�ٴ�ʩ�ӟ�����ʹ�A����ጷ���ʰȡ�����w����ܛ�C�����Ƅ�ҕ�l朽ӣ�https://youtu.be/5SIwsw9IyIc��

��3D ��ӡ��ܛҺ���������еĄ�����ʾ
Փ�Ĺ�ͬ��һ���ߡ������_���{������W��ʿ�� Haitao Qing
�f�����������@Щܛ�C���˷dz������҂�����ʹ��С�ͼt���Դ�����p�ɵ،������ӟ��� 64
�z�϶ȣ�����������s��Ҳ�ܿ죬�����@һϵ�в���ֻ��Ҫ��s�ɷ�犡����҄�����һ����Ҫ�ÊA�ӊAס���҂�߀չʾ��һ�N����Ȼ���������l�ĊA�ӡ��@Щ�A�ӿ��Կ����p�@���w������o�o�Aס���Ķ����F�ι�ץ�ա��@ƪՓ���nj��@��¼��g�ĸ�����C���҂����@���ܛ��������С��ܛ�C���ˡ�׃�ΙC���������t�W�����еĝ��ڑ��øе��dz��d�^����
(؟�ξ���admin)
 649��Ԫ��Revopointȫ��Me
649��Ԫ��Revopointȫ��Me 649��Ԫ��Revopointȫ��Re
649��Ԫ��Revopointȫ��Re �K�����������WԺ�Ƴ���
�K�����������WԺ�Ƴ��� �F���������F���t��Ժ�ǿ�
�F���������F���t��Ժ�ǿ� �㽭ʡ�����tԺ/�㽭��W
�㽭ʡ�����tԺ/�㽭��W ADNOC Gasʹ��3D��ӡ����
ADNOC Gasʹ��3D��ӡ����������
- ��649��Ԫ��Revopointȫ��MetroX 3D����
- ��649��Ԫ��Revopointȫ��Revopoint Metr
- ���K�����������WԺ�Ƴ�����3D��ӡģ��
- ���F���������F���t��Ժ�ǿ��[���F꠳ɹ�
- ���㽭ʡ�����tԺ/�㽭��W�Fꠣ����ܸ�
- ��ADNOC Gasʹ��3D��ӡ���������P�I��Q
- ��SpaceX��������Ş����ل��o䛣�����3D
- �����a�մ�3D��ӡ�˹����ޏͣ������Ƽ���
- ��3D��ӡ�����NƬ������С���ӡ�����
- ������é˹ˇ�g��W�W����������������
 �炐�ȁ���W����
�炐�ȁ���W���� ʧȥ1/3����,���
ʧȥ1/3����,��� 3D��ӡܛƤ�|����
3D��ӡܛƤ�|���� 3D��ӡ��Q������
3D��ӡ��Q������ ���ܲ����¡����T
���ܲ����¡����T �����\��Ʒ��Jack
�����\��Ʒ��Jack���c����
- ��3D��ӡ��������3D��ӡ�P���������ij���
- ����3D��ӡ�C�����b���ˣ�����3d��ӡ��һ
- ���Լ�������һ�_ֻ��20��Ԫ��3D��ӡ��
- ���֙C��ע���ˣ��Ø�ݮ��+3D��ӡ�C����
- ���P�c3D��ӡ���ޏ�������E�еĽ��䰸��
- ���D�⣺3D��ӡ�������a����
- ��SOLS��˾�l���ɶ��Ƶ�3D��ӡ�C��Ь�|
- ��ӯ��3D��ӡ�������䰸������
- ��10�����ص�3D��ӡ���裬����һ������ϲ
- ��3D��ӡ���҃��b�đ��ã��cȼ�㌦���g


