Nature ���������ͷ����C(j��)����RAVEN��3D��ӡ�x���(l��i)�B(ni��o)�w�����о�
2024��12�£���(l��i)����ʿ��ɣ(li��n)�������W(xu��)Ժ (EPFL) ���о��ˆT��Nature�ϰl(f��)�����P(gu��n)�ڷ����C(j��)���� RAVEN (Robotic Avian-inspired Vehicle for multiple ENvironments) �������о��ɹ����˙C(j��)����ģ���B(ni��o)�(l��i)���܉����ߡ����S���w�У����������B(ni��o)�(l��i)���l(f��)�����w�C(j��)�ƣ���(sh��)�F(xi��n)�˸�Ч�Ŀ���-�����^(gu��)�ɡ�3D ��ӡ���g(sh��)�� RAVEN �������^(gu��)���аl(f��)�]���P(gu��n)�I���ã��x�����@�(xi��ng)ͻ�����о���

�����
��ģ�B(t��i)�\(y��n)��(d��ng)�C(j��)���˵��_(k��i)�l(f��)һֱ���R����(zh��n)����νY(ji��)�϶�N�\(y��n)��(d��ng)ģʽ�������ߡ����S���w�У����������^(gu��)��������͙C(j��)е��(f��)�s����һ��(g��)�y�}���F(xi��n)�еĶ�ģ�B(t��i)�C(j��)����ͨ��ֻ��һ�N���w������\(y��n)��(d��ng)ģʽ�����B(ni��o)�(l��i)�܉��p�ɵ��ڲ�ͬ�\(y��n)��(d��ng)ģʽ֮�g�ГQ���@���l(f��)���о��ˆT���`�С��B(ni��o)�(l��i)��Ч�����w�C(j��)�ƣ��e�����S���w���ɞ��� RAVEN �O(sh��)Ӌ(j��)�ĺ���˼�롣
�����B(ni��o)�(l��i)���l(f��)�ęC(j��)�����O(sh��)Ӌ(j��)����
��j��)?n��i)��
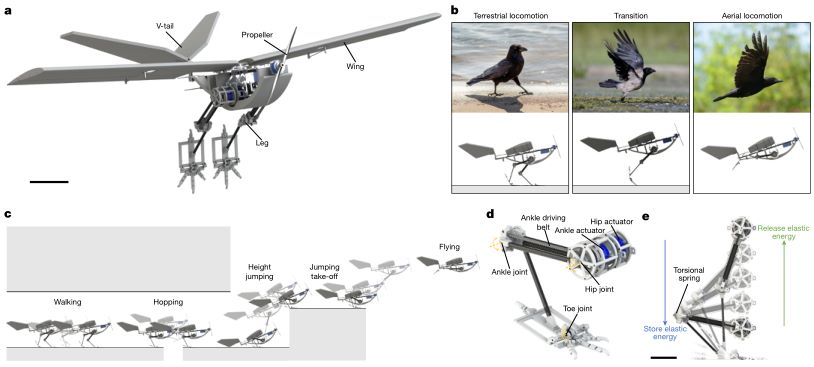
RAVEN �ĺ��Ą�(chu��ng)�����������B(ni��o)�(l��i)��֫���l(f��)�ķ����Ȳ��C(j��)��(g��u)���c��(f��)�s���B(ni��o)�(l��i)�Ȳ��Y(ji��)��(g��u)��ͬ��RAVEN ���Ȳ��O(sh��)Ӌ(j��)��(ji��n)����ֻ���β����ײ����_������(g��)��Ҫ���֣���ͨ�^(gu��)�����β����ײ��P(gu��n)��(ji��)��(l��i)��(sh��)�F(xi��n)���ߡ����S���w�еȶ�N�\(y��n)��(d��ng)ģʽ��
��3D��ӡ���P(gu��n)�I����
���ˌ�(sh��)�F(xi��n)�@һ�O(sh��)Ӌ(j��)���о��ˆT������(y��ng)���� 3D ��ӡ���g(sh��)��RAVEN ���S���P(gu��n)�I�����������X݆�䡢�Ȳ��B�Ӽ����_���Y(ji��)��(g��u)�Լ��C(j��)����ܵȣ�����ʹ��3D��ӡ�C(j��)Ultimaker S5�Լ����g��PLA�����Ƴɵġ��@�N���췽ʽ���H���Կ��٘�(g��u)����(f��)�s�Ď��Π߀�܉����(j��)��Ҫ�{(di��o)���O(sh��)Ӌ(j��)����(sh��)���Ķ���(y��u)���C(j��)���˵����������磬RAVEN ���_���O(sh��)Ӌ(j��)�����˱�ƽ��Y(ji��)��(g��u)����ͨ�^(gu��) 3D ��ӡ���g(sh��)���_ֺ̎�����˱���(d��ng)�����P(gu��n)��(ji��)��������(qi��ng)����ꑵ��\(y��n)��(d��ng)�͵���-�����^(gu��)���^(gu��)���еķ�(w��n)���Ժ��`���ԡ����⣬3D ��ӡ߀ʹ���о��ˆT�܉���ٵ����O(sh��)Ӌ(j��)�����ڌ�(sh��)�(y��n)�в�����M(j��n) RAVEN �����ܡ�
�����Ȳ��C(j��)��(g��u)��RAVEN ߀�����ǰ�����������C(j��)����β�����Ԍ�(sh��)�F(xi��n)�����w�С�ͨ�^(gu��)ͬ�������Ȳ��\(y��n)��(d��ng)��������������RAVEN �܉���ٵ؏ĵ����^(gu��)�ɵ����С�

��Ultimaker S5��ӡ�C(j��)��һ���(zh��n)���I(y��)��(j��)��3D��ӡ�C(j��)���������M(j��n)���p���^�\(y��n)��(d��ng)ϵ�y(t��ng)���^��Ę�(g��u)���w�e����֧���ϰٷN�IJ�
��Y(ji��)��
�����w��(sh��)�(y��n)
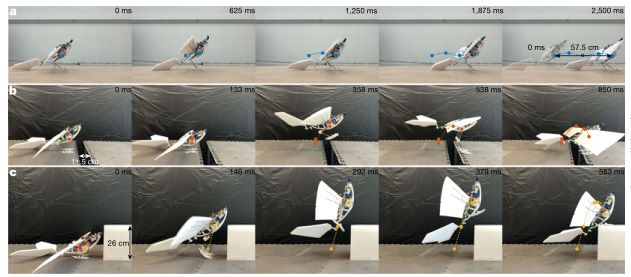
��ꑵ��\(y��n)��(d��ng)��RAVEN�܉���0.23���ٶ��B�m(x��)����(a)�����^(gu��)11.5mm���g϶(b)�����S�^(gu��)26cm�Ĵ�ֱ�ϵK
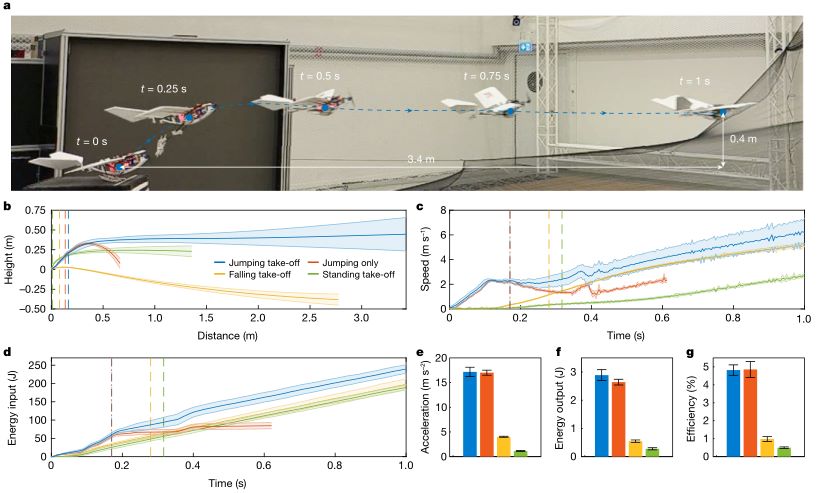
��(sh��)�(y��n)�Y(ji��)��������RAVEN �܉���ÿ�� 2.4 ���ٶȣ��ஔ(d��ng)�������L(zh��ng)�� 4.8 �������S���w���@�Ȇμ��������������w��Ч�ʸ��ߡ��c�������w��ʽ���牋�����w��վ�����w����ȣ����S���w���ٶȺ�����Ч�ʷ��涼�����@����(y��u)��(sh��)�����⣬RAVEN ߀�܉��M(j��n)�����ߡ����S�߶����S�ȶ�N�����\(y��n)��(d��ng)ģʽ��չ�F(xi��n)�������Ժ��`���ԡ�
չ��
RAVEN �ijɹ����ƞ��ģ�B(t��i)���ЙC(j��)���˵��O(sh��)Ӌ(j��)�ṩ���µ�˼·��δ��(l��i)���о��ˆTӋ(j��)���M(j��n)һ��̽�����p��IJ��Ϻ���Ч���(q��)��(d��ng)��ʽ�������� 3D ��ӡ���g(sh��)��(y��u)�� RAVEN �ĽY(ji��)��(g��u)�����ܡ��@�(xi��ng)�о������Ƅ�(d��ng)��ܙC(j��)���˵İl(f��)չ�������䑪(y��ng)����������Ԯ���h(hu��n)���O(ji��n)�y(c��)���I(l��ng)�� 3D ��ӡ���g(sh��)�Ŀ��ٵ����Ͷ��ƻ���(y��u)��(sh��)����δ��(l��i)�C(j��)�����аl(f��)�аl(f��)�]Խ��(l��i)Խ��Ҫ�����ã��Ƅ�(d��ng)��ģ�B(t��i)�C(j��)���˼��g(sh��)���M(j��n)����
ԭ��朽ӣ�https://doi.org/10.1038/s41586-024-08228-9
(؟(z��)�ξ���admin)
��һƪ���ƌW(xu��)��3D��ӡ��ɺ����������ֲ���Ʒ���H��2-4�ܼ����L(zh��ng)���¹�
 �ƌW(xu��)��3D��ӡ��ɺ��������
�ƌW(xu��)��3D��ӡ��ɺ��������- Nature ���������ͷ����C(j��)
 �о��ˆT3D��ӡ�ؿ�׃����
�о��ˆT3D��ӡ�ؿ�׃���� ʹ������ vECM-GelMA-SF
ʹ������ vECM-GelMA-SF  Curtiss-Wright��Sintavia
Curtiss-Wright��Sintavia Axial3D �c GE HealthCare
Axial3D �c GE HealthCare
- ���ƌW(xu��)��3D��ӡ��ɺ����������ֲ���Ʒ��
- ��Nature ���������ͷ����C(j��)����RAVEN��3D
- ���о��ˆT3D��ӡ�ؿ�׃���쾀(xi��n)��������
- ��ʹ������ vECM-GelMA-SF ����īˮͨ�^(gu��)3
- ��Curtiss-Wright��Sintavia������(gu��)��܊��
- ��Axial3D �c GE HealthCare ��������(sh��)�F(xi��n)
- ��3D��ӡ�~(y��)�⼴�����¼��¼������^(q��)�̘I(y��)
- ����Ů��TikTok��չʾ�Լ�ُ(g��u)�I(m��i)��3D��ӡ��
- ���ƌW(xu��)��3D��ӡ��ɺ����������ֲ���Ʒ��
- ��Nature ���������ͷ����C(j��)����RAVEN��3D
- ���о��ˆT3D��ӡ�ؿ�׃���쾀(xi��n)��������
- ��ʹ������ vECM-GelMA-SF ����īˮͨ�^(gu��)3
- ��Curtiss-Wright��Sintavia������(gu��)��܊��
- ��Axial3D �c GE HealthCare ��������(sh��)�F(xi��n)
- ��3D��ӡ�~(y��)�⼴�����¼��¼������^(q��)�̘I(y��)
- ����Ů��TikTok��չʾ�Լ�ُ(g��u)�I(m��i)��3D��ӡ��
- ��Signifyͨ�^(gu��)3D��ӡ���g(sh��)��ӡ��(sh��)ǧ�K����
- ���M���p��ԭλ���ƻ��ޏ�(f��)�ķeľʽ3D��ӡ
 3D��ӡ��(sh��)�F(xi��n)��̶�
3D��ӡ��(sh��)�F(xi��n)��̶� �炐�ȁ���W(xu��)����
�炐�ȁ���W(xu��)���� ʧȥ1/3����,���
ʧȥ1/3����,��� 3D��ӡܛƤ�|����(qi��ng)
3D��ӡܛƤ�|����(qi��ng) 3D��ӡ��Q������
3D��ӡ��Q������ ���ܲ����¡����T(m��n)
���ܲ����¡����T(m��n)- ��3D��ӡ��������3D��ӡ�P����(hu��)�����ij���
- ����3D��ӡ�C(j��)�����b���ˣ�����3d��ӡ��һ
- ���Լ���(d��ng)����һ�_(t��i)ֻ��20��Ԫ��3D��ӡ��
- ���֙C(j��)��ע���ˣ��Ø�(sh��)ݮ��+3D��ӡ�C(j��)����
- ���P(p��n)�c(di��n)3D��ӡ���ޏ�(f��)������E�еĽ�(j��ng)�䰸��
- ���D�⣺3D��ӡ�������a(ch��n)����
- ��SOLS��˾�l(f��)���ɶ��Ƶ�3D��ӡ�C��Ь�|
- ��ӯ��(chu��ng)3D��ӡ������(j��ng)�䰸������
- ��10����(d��)�ص�3D��ӡ���裬����һ������ϲ
- ��3D��ӡ���҃�(n��i)�b�đ�(y��ng)�ã��c(di��n)ȼ�㌦(du��)���g


