�fԒ���ܿ������ҿ�����������܇MindVLA��ģ�͌�(sh��)�yҕ�l�l(f��)��
�r(sh��)�g��2025-03-21 19:23 ��Դ��δ֪ ���ߣ�admin ��x����
��Ƽ�3��21����Ϣ���������磬������܇Ԕ��(x��)��B��MindVLA��ģ���c�F(xi��n)�ж˵���+VLM��ģ�͵ą^(q��)�e�������������P(gu��n)��(sh��)�yҕ�l�����������F(xi��n)������MindVLA ģ�ͼӳ��µ���܇����һ��(g��)���֣����c�Ñ���ͨ�������Ñ���D�����Ñ����������顣
���磬��������İ��܇��������܇λֱ��������ɲ�܇���������{�T��“�_���c(di��n)���_���c(di��n)����ա��ҹ�”���Z��ָ���M(j��n)���Єӣ���������l(f��)�o���ؘ�(bi��o)��Ƭ���D���K�ҵ���ȵȡ�������܇߀��ʾ��MindVLA��������܇��һ���Ԅ��{���ļܘ�(g��u)��ʹ����MindGPT�����Z�Ի�����demo�е��Z��ͨ�^��œ��ASR��׃�����֣�ݔ��o MindVLA��
�@һ�O(sh��)Ӌ(j��)�^���� MindGPT ���Z�������c�����I(l��ng)��ă�(y��u)�����������Z�x������߉�����ȣ�����ᘌ��Ԅ��{�����M(j��n)���ˌ��(xi��ng)��(y��u)�����@�w�F(xi��n)����œ�c���{�ڹ��܌ӵąf(xi��)ͬ��(chu��ng)�£�����ϵ�y(t��ng)�ӵ���ȫ�ںϡ�δ�����҂������m(x��)̽����ģ�B(t��i)�����c�{�Q�ߵ������ϣ����Ñ��ṩ����Ȼ��“��܇���{”�w�(y��n)��
�fԒ���ܿ������ҿ�����������܇MindVLA��ģ�͌�(sh��)�yҕ�l�l(f��)��
�����ĽY(ji��)������̎����Ƽ�
(؟(z��)�ξ���admin)
��һƪ���vӍ��Ԫ�״��ϰ�Chatbot Arena�������Q��ȫ��Top 15
��һƪ��Λρ�t(y��)����ģ�ͽ�Q������ʽ�l(f��)�����t(y��)Ժ���t(y��)�����Ñ�����a(ch��n)Ʒ�wϵ����
��һƪ��Λρ�t(y��)����ģ�ͽ�Q������ʽ�l(f��)�����t(y��)Ժ���t(y��)�����Ñ�����a(ch��n)Ʒ�wϵ����
���P(gu��n)��(n��i)��
 Deepseek�����{(di��o)�����P(gu��n)����
Deepseek�����{(di��o)�����P(gu��n)���� Ӳ���������P(gu��n)�����Ї��@��
Ӳ���������P(gu��n)�����Ї��@�� �˹������(q��)�ӵ�3D��ģƽ�_
�˹������(q��)�ӵ�3D��ģƽ�_ �O���t(y��)���ۇ���������(j��)�QAI
�O���t(y��)���ۇ���������(j��)�QAI DeepSeek V3С�汾������
DeepSeek V3С�汾������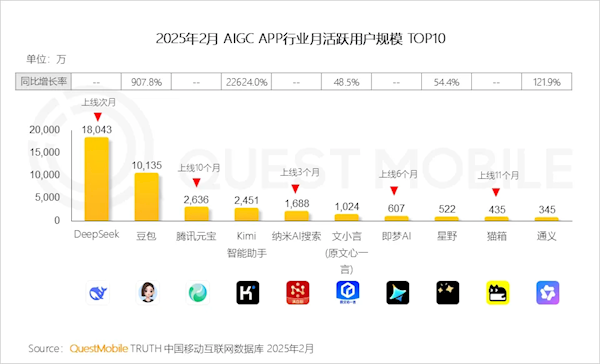 �Ї�AI��ģ��APP�»�TOP10
�Ї�AI��ģ��APP�»�TOP10
- ��Deepseek�����{(di��o)�����P(gu��n)�����܌�(d��o)��3D��ӡ
- ��Ӳ���������P(gu��n)�����Ї��@�ҹ�˾��AI��3D
- ���˹������(q��)�ӵ�3D��ģƽ�_ Tripo AI ��
- ���O���t(y��)���ۇ���������(j��)�QAI�t(y��)��+������
- ��DeepSeek V3С�汾��������������ǰ��
- ���Ї�AI��ģ��APP�»�TOP10���t��DeepSe
- ��AI�L�۾��ˣ��ȸ��Ƴ�Gemini��(sh��)�r(sh��)ҕ�l��
- ������������AI ����o��(li��n)�W(w��ng)���¶���
����(n��i)��
- ��Deepseek�����{(di��o)�����P(gu��n)�����܌�(d��o)��3D��ӡ
- ��Ӳ���������P(gu��n)�����Ї��@�ҹ�˾��AI��3D
- ���˹������(q��)�ӵ�3D��ģƽ�_ Tripo AI ��
- ���O���t(y��)���ۇ���������(j��)�QAI�t(y��)��+������
- ��DeepSeek V3С�汾��������������ǰ��
- ���Ї�AI��ģ��APP�»�TOP10���t��DeepSe
- ��AI�L�۾��ˣ��ȸ��Ƴ�Gemini��(sh��)�r(sh��)ҕ�l��
- ������������AI ����o��(li��n)�W(w��ng)���¶���
- ��Λρ�t(y��)����ģ�ͽ�Q������ʽ�l(f��)�����t(y��)Ժ
- ���fԒ���ܿ������ҿ�����������܇MindVL
���]��(n��i)��
���c(di��n)��(n��i)��
- ������֪�R�a(ch��n)��(qu��n)��?j��n)MҎ(gu��)���˹�����ϵ�y(t��ng)����
- ����¶����ָ����ʲô��Ф,�~�Z���x���x
- ����Ժʿ�����挦�桹��܊���˹����ܼ��g(sh��)
- ���˹����ܕr(sh��)�������ҽ��hÿ����I(y��)��Ҫ�O(sh��)
- ��������Ϣ���İl(f��)�����˹������ИI(y��)��(y��ng)�ý�
- ��(li��n)�χ��˹�����֮��С�M��ʽ���� �з�
- ����R�^(q��)�����˹����ܽ���ԇ�(y��n)�^(q��)�����Є�
- ������������ӏ�(qi��ng)��С�W(xu��)�˹����ܽ������C(j��)
- �������չ����˹����ܺͼ���؛����(w��)ؓ(f��)؟(z��)
- ��ȫ�������·��(bi��o)��(zh��n)�����g(sh��)ί�T���˹�����


