�ƌW��3D��ӡ���g���M�ʎr�C����RoboSimian

������˹̹����WҲ�����^һ�������W���_�lϵ�y���ıڻ����ϼ�ȡ�`�У�Ȼ���OӋ����С�����P�ʹ́�������ڙC���˫@ȡ����ı��栿��������ˣ��mȻ�˴ε��OӋ������ȫ�¸�������о��ˆT�s���˳��^ʮ��ĕr�g����ɣ���Ҋ���\�⡣���F�ڣ�RoboSimian�����ǰ�����ڙC���ˁ��f���ٶȼӿ����ı������ҿ�������ȫ��ֱ�Ďrʯ�����M��������
���������������ӹ��̎��W���Ĉ��ָ����RoboSimian�ڹ����r��ʹ�Ï��s����Ё��o�oץס�rʯ���档��ˣ�RoboSimian�ڿؼ�����������ȫ���^���y�����C���˵ġ��������ı�����^�ֲڣ��������Ǻ�С��һ���֣������߀���Գ��d�������������������@ʾ����

���Ї�3D��ӡ�W�˽⣬��RoboSimian�����a�У�3D��ӡ���g���Á����a�ܺ��L15����䓴̡�˹̹���о��ˆT�J��3D��ӡ���⚤һ�����܉�p�p������ͬ�rʹ�������;�̼�����Ȳ��Ͽ����������_������������
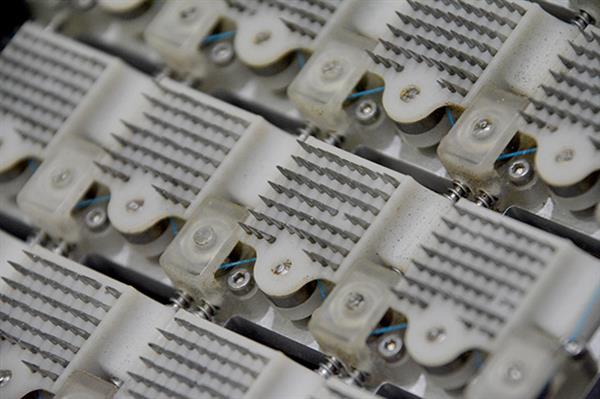
���ڴ�ǰ�҂����ᵽ���܉������ı��ٶȣ��t��ͨ�^ʹ�Æ�һ�������S�_���ġ�ÿһ�K��Ƭ����60��䓴̣�ÿʮ���K��Ƭ�M��һ���M������˾����˸���������ͳ�������ͬ�r�����е�䓴̶���һ�����췽�����ץ���������c�������������γ�һ�����M����
Ŀǰ��˹̹���о��ˆT߀���M���Mһ�������팍���RoboSimianҪ���ڹ⻬�ı������Ƅ�߀�Ǻ����y��չ��δ�������RoboSimian�܉�õ��Mһ�����о�����ô�@헼��g�����п��ܱ�������և������M����ґ��á�
(؟�ξ���admin)
 �������S������������RAPI
�������S������������RAPI 2019���Ї����ܸ�ِ������
2019���Ї����ܸ�ِ������ ����˄����M����������ǧ
����˄����M����������ǧ ���ֽ�����ǧ�|�a�I������
���ֽ�����ǧ�|�a�I������ ���ϴ�W�����뱭��3D��ӡ
���ϴ�W�����뱭��3D��ӡ �������S���M�㽭�Ƽ��WԺ
�������S���M�㽭�Ƽ��WԺ- ��̽�����w���ģʽ ����Ӳ�Ƽ�����
- ���������S������������RAPID+TCT 3D��ӡ
- ��2019���Ї����ܸ�ِ�����뱭��3D��ӡ��
- �����h�r��CEOҦ־�h������ϯ�\�ӿƼ��c
- ������˄����M����������ǧ�|����������
- �����ֽ�����ǧ�|�a�I������һվʽ����ƽ
- �����ϴ�W�����뱭��3D��ӡ�����ِ�A�M
- ���������S���M�㽭�Ƽ��WԺ ���M3D��ӡ
- �����H�����^�գ��Ї�3D��ӡ�����^�c����
- ��ȫ������3D��ӡ�˹��i�g�P�ÓQ�g����
 ���H�����^�գ���
���H�����^�գ��� ȫ������3D��ӡ��
ȫ������3D��ӡ�� δ�����ǬF�ڣ���
δ�����ǬF�ڣ���- �����Ƚ���3D��ӡ�C��P�c
- ����֮ī���п�Ժ�w����ȫ��Һ�B����3D��
- �����������ɴ�����3D��ӡ�����ȏ�֧�߹�
- �����XҲ��3D��ӡ����1С�r��ɷNֲ��
- ���������S������������RAPID+TCT 3D��ӡ
- �������A���v�_��45�콨��400ƽ��3D��ӡ
- ��2019���Ї����ܸ�ِ�����뱭��3D��ӡ��
- ���_���о��ˆT�ɹ��Ƴ��h����3D��ӡ���
- ��̽�����w���ģʽ ����Ӳ�Ƽ�����
- �����h�r��CEOҦ־�h������ϯ�\�ӿƼ��c


