����������C���˅fͬ늻���������Ӄȳ��e·���ķ����c�{��
�r�g��2024-01-18 09:20 ��Դ��WAAM늻����� ���ߣ�admin ��x����
�������죨AM��Ŀǰ���ÏV�������д��ͽ�����������������ѱ��_����һ����ǰ�����о�����늻��������죨WAAM�����ھ��гɱ��ͺ�Ч�ʸߵă��c�����m������������д�ߴ���Π�ͽY���^����s����������⣬WAAM���Ժ����ؼ��ɵ����I�C�����У��@�����������������ɶȣ����pС����������ijߴ����ơ�
Ȼ����ͨ�^����������ϵ�y�������׳߶��µ������Ȼ��Ҫ�����������L�r�g���L�ڳ��e��ˇ��Ҫ��ˮƽ��ϵ�y�����ԣ��Դ_�����a����oȱ�ݡ������������Ч�ʣ����C���˅f��WAAM��MRC-���ѽ����ƏV���@��Ҫ�����C����AMϵ�y�fͬ������
�ڴ˻��A�ϣ��|�ϴ�W�����ܸ����ڼ���F���֪���ڿ� Virtual and Physical Prototyping��IF=10.6���ϰl���}Ŀ�� ��Allocation and scheduling of deposition paths in a layer for multi-robot coordinated wire and arc additive manufacturing of large-scale parts�����о�Փ�ġ��������E���ڈ��Ќ��H���e��ˇ֮ǰ����ÿ�ӷ�����{�șC���˳��e·������C���˷�����e·�������ڿ��]��̿������r�g���������Ͱ�ȫ����r���{�ȳ��e�^�̡����y�c�����㷨�ĸߕr�g���s�ȡ����@Щ�y�c�����£����о��ᵽ�ķ���ּ���_�lһ�N�㷨��Q�������Դ��MMRC-WAAM�^��Ҏ����
�о�Ŀ��
���о�ּ�ڽ�Q���C���˅fͬ늻��������죨MRC-WAAM��ϵ�y�е��P�I���}�������Ч�ط�����{��ÿ�ӵij��e·�����@һ����Դ�ڃ����C���˹����r�g���΄����ͳ��e���r���R�ĸߕr�g���s�ԡ��о��Fꠄ����_�l��һ�N�ġ�top k%��������ͨ�^������ʽ��k%�L�ȵ�·�����΄Վ����o��ǰ�����΄������ٵęC���ˣ�ֱ������·���������ꮅ���@һ�����܉�ʹ���C���˵��΄������ȣ�ͬ�r��߷���Y����·���������ԣ��Ķ����MRC-WAAM�ij����|����
�����
���о�����ġ�top k%�������ڔ��W��ͨ�^һ�����гɱ���ꇁ����x��ԓ����ͨ�^Ӌ�㹤���r�g��·�����x�������΄գ�������С�����ЙC���˵Ŀ������r�g��Ŀ�ˡ��о���߀���]��·���������Ժ͙C�����g�İ�ȫ���x���Դ_�����e�^���в����l���C����֮�g����ײ��
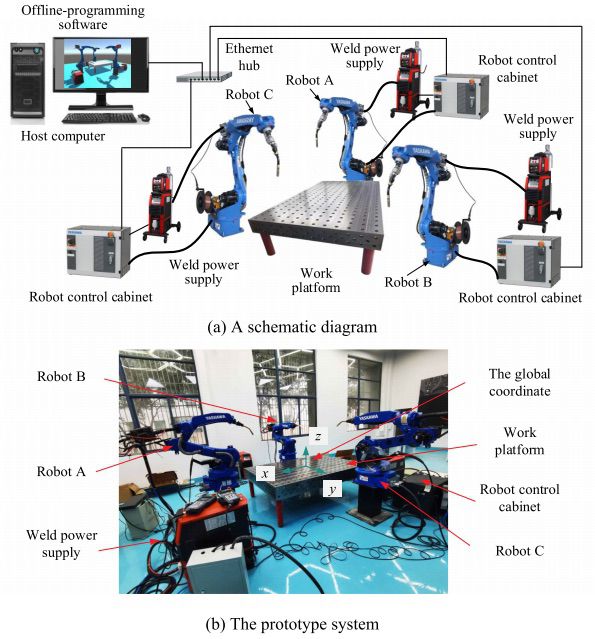
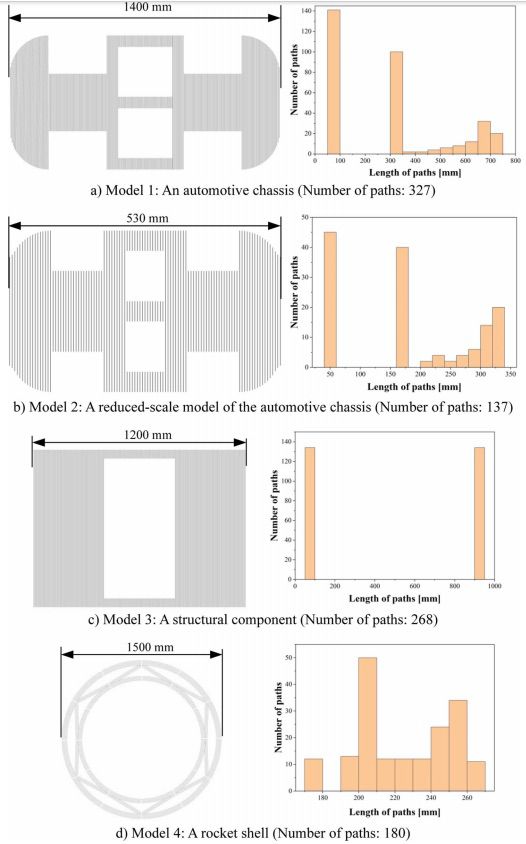
������C�㷨����Ч�ԣ��о��Fꠘ�����һ����������YASKAWA AR1730���I6�S�C���˺�MEGMEET Artsen Plus 500Q�����Դ�Ĝyԇƽ�_��ʹ�����ض��IJ��Ϻͅ�����ͨ�^MATLAB R2021b���F�˷�����{���㷨�����֞�ɂ��A�Σ�һ�����Ă���ͬ�L�Ⱥ�·�������Ĵ������ģ������C�㷨�Ŀ����ԣ������xȡһ��ģ���M�Ќ��H�ij��e��C���Y��������ԓ�����ڜp���D���c�Δ������c���惞�ڬF�н�Q��������C�����ڌ��H�����е���Ч�ԡ�
Փ�ĈDƬ



Ȼ����ͨ�^����������ϵ�y�������׳߶��µ������Ȼ��Ҫ�����������L�r�g���L�ڳ��e��ˇ��Ҫ��ˮƽ��ϵ�y�����ԣ��Դ_�����a����oȱ�ݡ������������Ч�ʣ����C���˅f��WAAM��MRC-���ѽ����ƏV���@��Ҫ�����C����AMϵ�y�fͬ������
�ڴ˻��A�ϣ��|�ϴ�W�����ܸ����ڼ���F���֪���ڿ� Virtual and Physical Prototyping��IF=10.6���ϰl���}Ŀ�� ��Allocation and scheduling of deposition paths in a layer for multi-robot coordinated wire and arc additive manufacturing of large-scale parts�����о�Փ�ġ��������E���ڈ��Ќ��H���e��ˇ֮ǰ����ÿ�ӷ�����{�șC���˳��e·������C���˷�����e·�������ڿ��]��̿������r�g���������Ͱ�ȫ����r���{�ȳ��e�^�̡����y�c�����㷨�ĸߕr�g���s�ȡ����@Щ�y�c�����£����о��ᵽ�ķ���ּ���_�lһ�N�㷨��Q�������Դ��MMRC-WAAM�^��Ҏ����
�о�Ŀ��
���о�ּ�ڽ�Q���C���˅fͬ늻��������죨MRC-WAAM��ϵ�y�е��P�I���}�������Ч�ط�����{��ÿ�ӵij��e·�����@һ����Դ�ڃ����C���˹����r�g���΄����ͳ��e���r���R�ĸߕr�g���s�ԡ��о��Fꠄ����_�l��һ�N�ġ�top k%��������ͨ�^������ʽ��k%�L�ȵ�·�����΄Վ����o��ǰ�����΄������ٵęC���ˣ�ֱ������·���������ꮅ���@һ�����܉�ʹ���C���˵��΄������ȣ�ͬ�r��߷���Y����·���������ԣ��Ķ����MRC-WAAM�ij����|����
�����
���о�����ġ�top k%�������ڔ��W��ͨ�^һ�����гɱ���ꇁ����x��ԓ����ͨ�^Ӌ�㹤���r�g��·�����x�������΄գ�������С�����ЙC���˵Ŀ������r�g��Ŀ�ˡ��о���߀���]��·���������Ժ͙C�����g�İ�ȫ���x���Դ_�����e�^���в����l���C����֮�g����ײ��
������C�㷨����Ч�ԣ��о��Fꠘ�����һ����������YASKAWA AR1730���I6�S�C���˺�MEGMEET Artsen Plus 500Q�����Դ�Ĝyԇƽ�_��ʹ�����ض��IJ��Ϻͅ�����ͨ�^MATLAB R2021b���F�˷�����{���㷨�����֞�ɂ��A�Σ�һ�����Ă���ͬ�L�Ⱥ�·�������Ĵ������ģ������C�㷨�Ŀ����ԣ������xȡһ��ģ���M�Ќ��H�ij��e��C���Y��������ԓ�����ڜp���D���c�Δ������c���惞�ڬF�н�Q��������C�����ڌ��H�����е���Ч�ԡ�
Փ�ĈDƬ
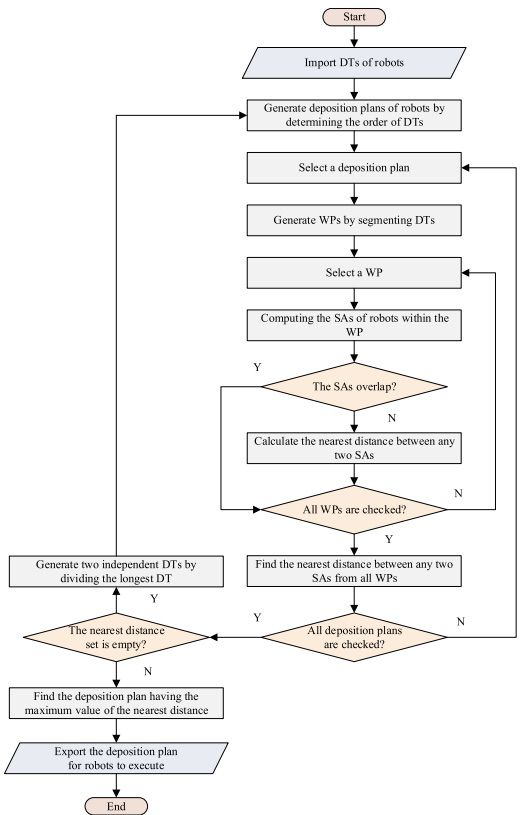
�D1.ֱ�ӌ���Ƭ�ָ���Ӆ^����M��MRC-AM��·��Ҏ��ʾ��
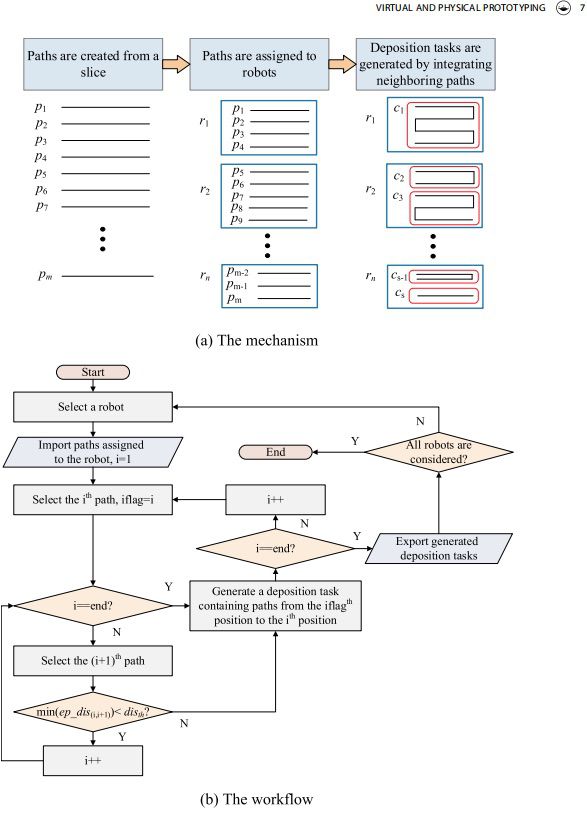
�D2.��MRC-WAAM������e·���Ŀ��w��������
�D3.ʹ�á�top k%�������M�ж��C���˳��e·�������㷨����
�D4. ���e�΄������㷨����
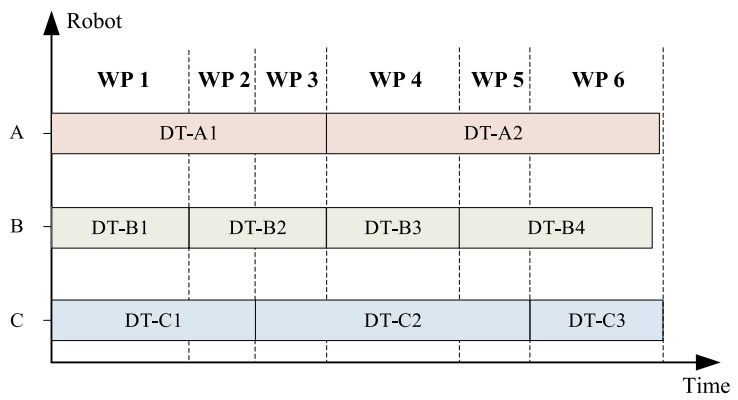
�D5.���x���eӋ���Ĺ����A�Σ�WPs��
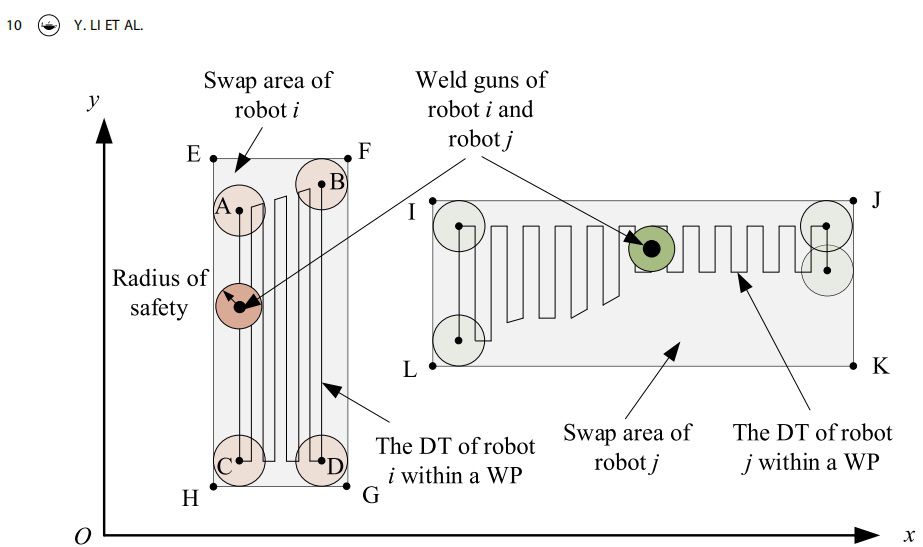
�D6.�z��WP�șC���˒��^�^���Ƿ�l������
�D7. MRC-WAAMϵ�y�{�����ɳ��e�΄������㷨����
�D8. �����Cƽ�_
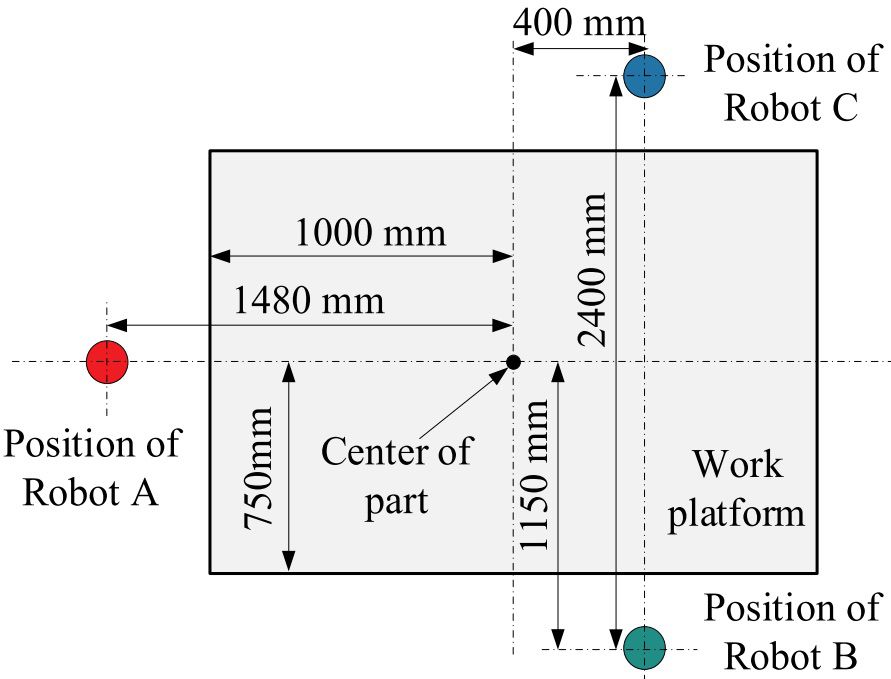
�D9.�C�����c�������֮�g�Ŀ��gλ���Pϵ
�D10.������C������������Ƭģ��
(؟�ξ���admin)
 Himed�u����ͬ��ɰĥ����3
Himed�u����ͬ��ɰĥ����3 ��ĩ�������Կ�����������
��ĩ�������Կ����������� Divergent��˾��3D��ӡ��
Divergent��˾��3D��ӡ�� ����ǻ�t�WԺ������3D��
����ǻ�t�WԺ������3D�� ��������٘���Ѫ�����
��������٘���Ѫ����� �Ƅ�ճ�Y�����䣨�T��/��
�Ƅ�ճ�Y�����䣨�T��/��������
- ��Himed�u����ͬ��ɰĥ����3D��ӡ⁺Ͻ�
- ����ĩ�������Կ�����������Ͻ��^�Y��
- ��Divergent��˾��3D��ӡ���g����܇��
- ������ǻ�t�WԺ������3D��ӡ�����ƽM��
- ����������٘���Ѫ������MƤ����ֲ��
- ���Ƅ�ճ�Y�����䣨�T��/����/�մɣ�3D��
- �����̻����w�����c3D�����ӡ�ںϣ��F��
- ���X�����������죺���ڿɳ��m��ҕ�ǵ���
- ���Ϻ��������픿��������պ��������
- ��3D��ӡ������������ڣ��༉�Y���{���c
 �x�^�����ۻ�����
�x�^�����ۻ����� ���;ۺ���3D��ӡ
���;ۺ���3D��ӡ 6K Additive����
6K Additive���� ��δ�����������
��δ����������� �Č�����������a
�Č�����������a 3D��ӡ�ڿ�ǻ�ޏ�
3D��ӡ�ڿ�ǻ�ޏ����c����
- ��3D��ӡ������ܶȺ����D��������x��
- ���Ź�ʮ�H��ʲô��Ф���~�Z���g����䌍
- ��������R�t���g��ʲô��Ф����һ�����
- �����^¶β��ʲô��Ф����һ������_��Ф
- ���˶�֮�Ŵ�һ�����_��Ф���~�Z��ጽ��x
- ��ĮĮˮ���w������ʲô��Ф����һ�����
- ��������R�t���g�´�һ������_��Ф����
- �����^¶β�´�һ������_��Ф�����x���
- ��ĮĮˮ���w������һ�ʴ_��Ф����ʲô��
- ���C������̻�3D��ӡ���g��������֬���_


