����������C���˅fͬ늻���������Ӄȳ��e·���ķ����c�{��(2)
�r�g��2024-01-18 09:20 ��Դ��WAAM늻����� ���ߣ�admin ��x����
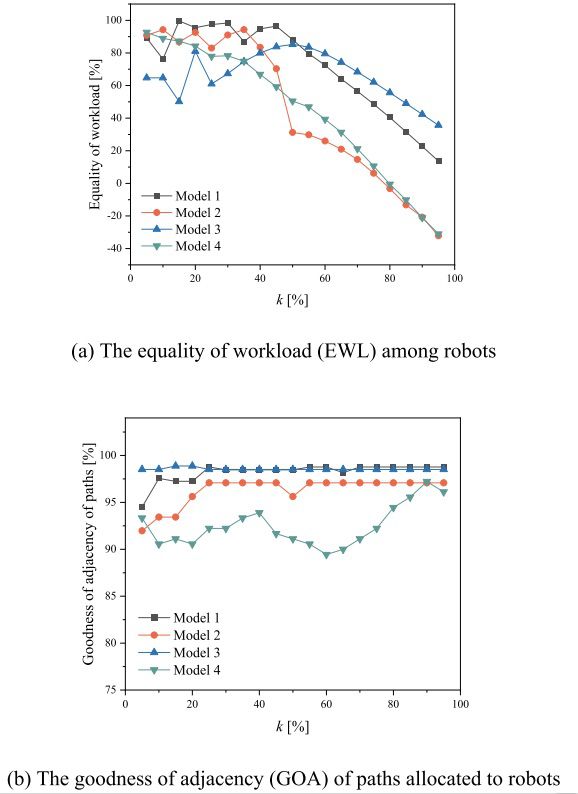
�D11.kȡֵ���㷨���ܵ�Ӱ�
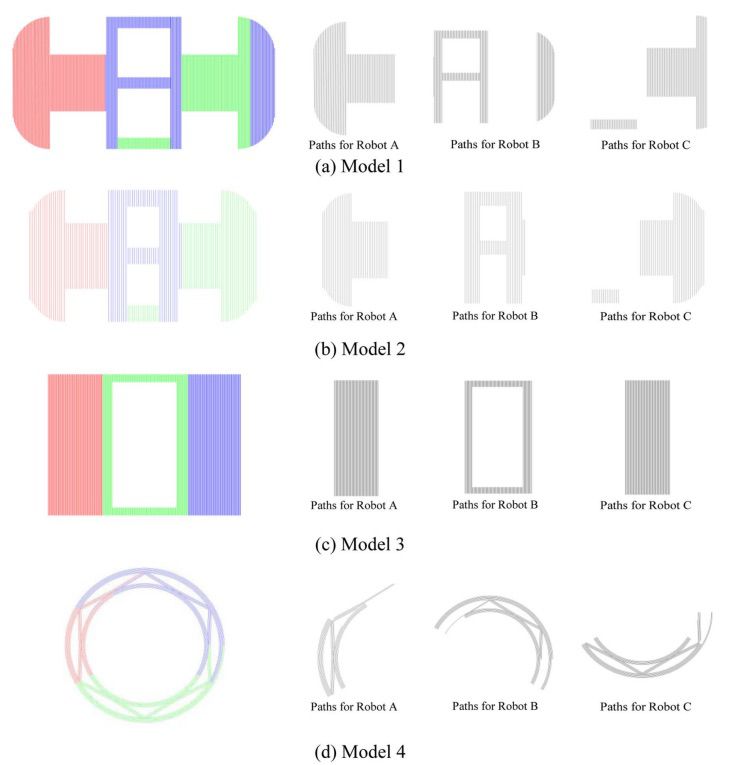
�D12. ʹ�á�top k%�������õ���·������Y��
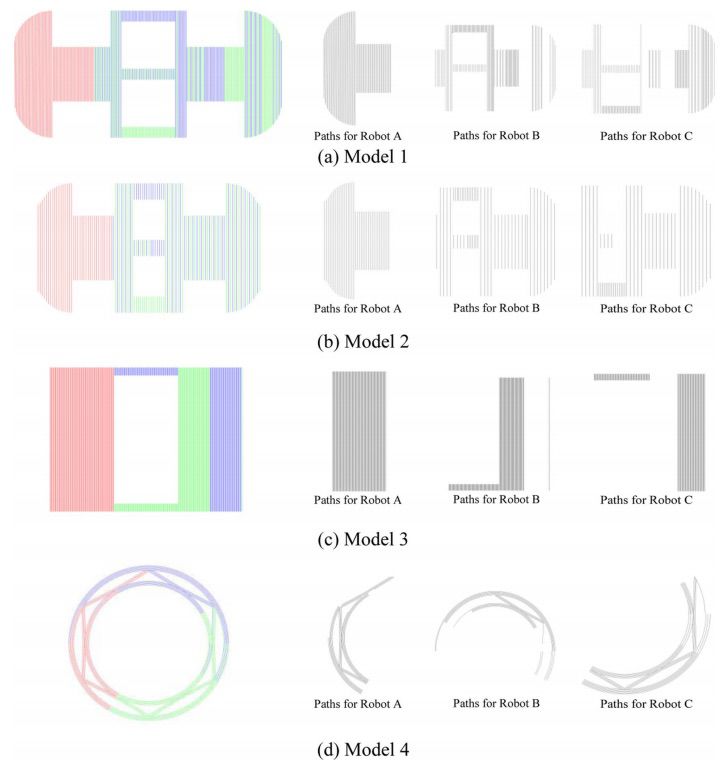
�D13. ��������õ���·������ĽY��
�D14�����e�^�̵ĸ��؈D
�D15�����e�΄����ɺ��{�ȵĽY��
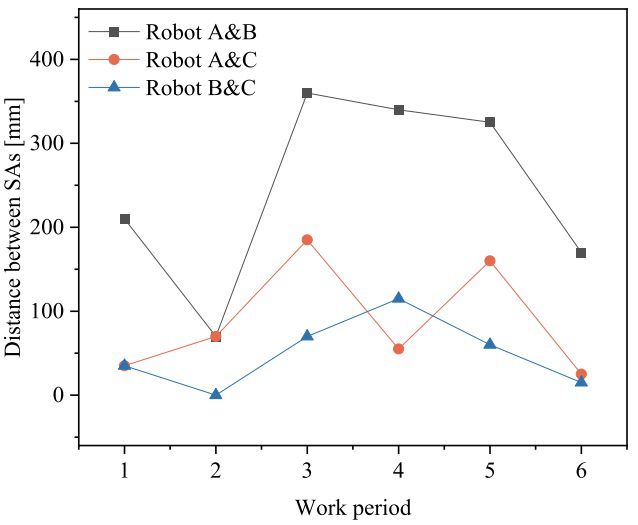
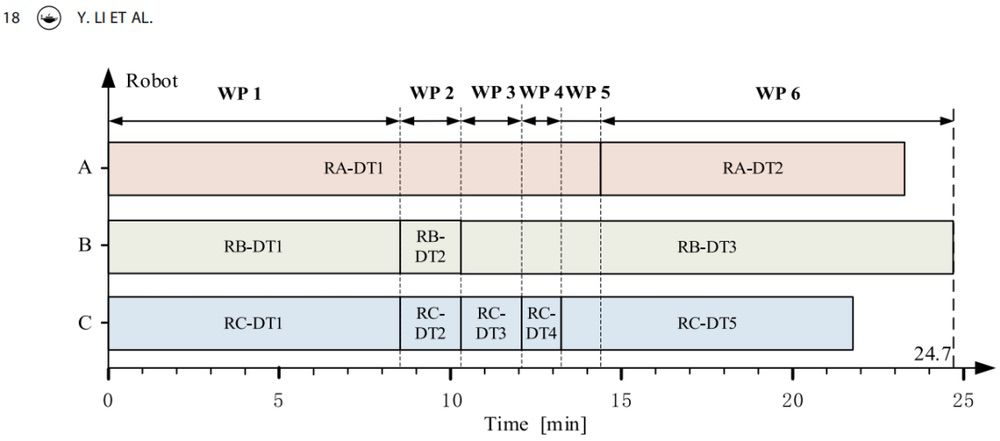
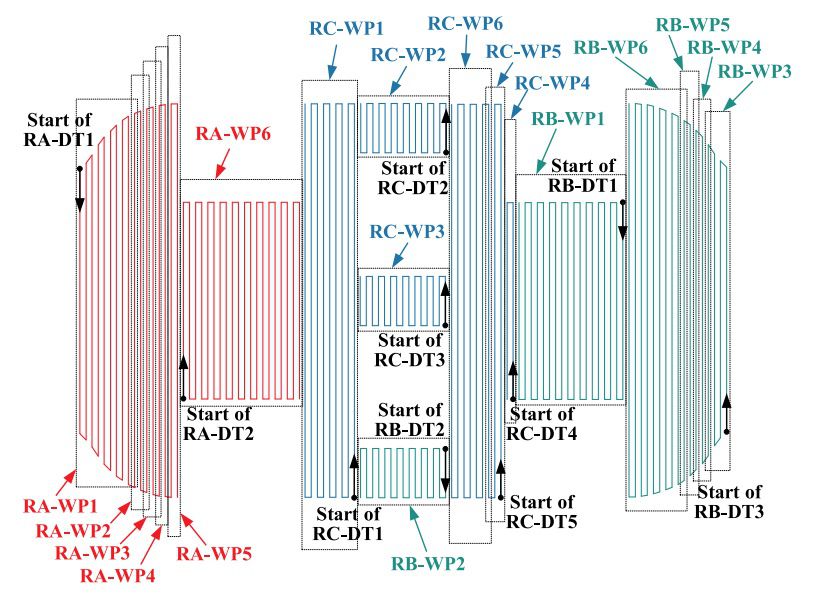
�D16. ÿ�������A�θ��C���˒��^��e֮�g�ľ��x
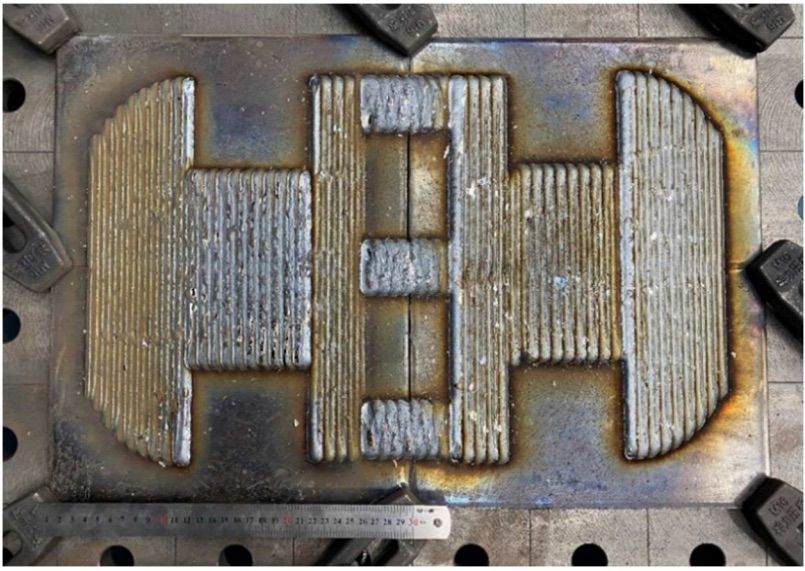
�D17. ���e��Ƭ�����^
�D18.ʹ��Bhatt����[31]����IJ������ɵķֳ��e·����Y��
�D19.����Shen����[33]����IJ������ɵij��e·������Y��
�P�I�YՓ
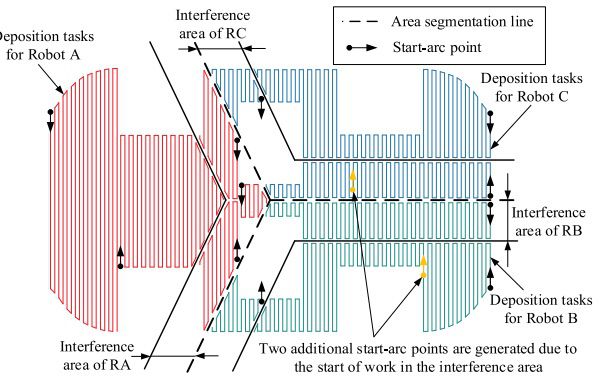
���Ľ�B��һ�N��top-k%��������ԓ���������ڴ��ͽ�������Ķ��C���˅f�{늻��������죨MRC-WAAM����·��������{�ȡ��YՓ���£�
(i)���о��C����ÿ�η������ӽ���k%��·������Ȼ�ر˴��������@�����˷���oÿ���C���˵�·���������ԡ�
��ii�������M�еİ����о��У����eӋ�����M��Ч�ʶ����_����92.1%���@�C����������ķ������Ա��֙C�����΄յľ����ԡ�
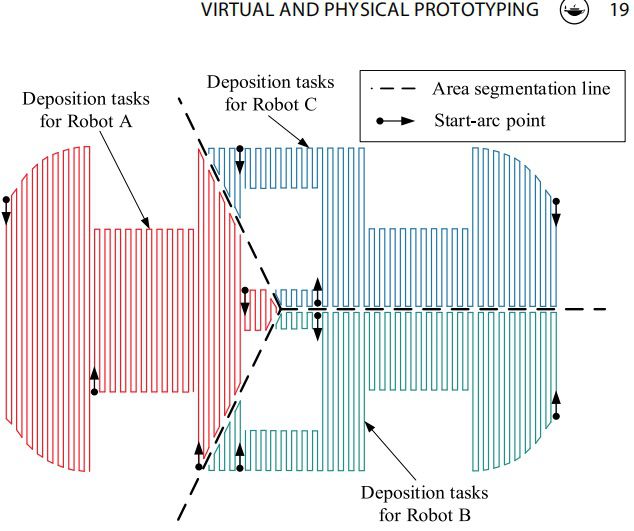
��iii�����Y��������top k%�����ڜp���D���c��������ʼ���c���惞��ֱ�ӷָ���������MRC-WAAM�ij����|����
��iv����Ӌ��ĽǶȁ�������topk%�����������˷�����{�Ȇ��}��Ӌ����s�ȡ����п��ܽ�Q������Ҫ���C���˅f�����\�Еr���m���ĄӑB�����е����P���}��
��һ����
�����ܣ������ڣ���ʿ��������2019��@���m��������������W�c�����I���I��W�p��ʿ�Wλ���|�ϴ�W��������W�ߣ�A�ӴΣ������Kʡ�ƅf�������e�˲ţ����Kʡ�p����ʿ���L�ڇ��@����������������ϵ�y��Փ�c�����_չ�о������������C��ҕ�X�c��Դ�ںς��С����C����Ⱥ�w�fͬ���ơ��C���W���cܛ�w�ӽ������ġ��O�جF�������ޏ��b��ȡ����և�����Ȼ�ƌW���𡢽��Kʡ�ش�Ƽ����A�Oʩ�A���Ŀ�n�}�����Kʡ��Ȼ�ƌW������Ŀ10��헣��l��SCI/EIՓ��20��ƪ���ڙ�/�����l������10��헣�����ʡ���cҎ���̲�1��������Ӣ�ČW�g����1����
Փ������
Yongzhe Li, Lingyi Meng, Minglang Li, Yijun Zhou, Xiaochao Liu, Xinlei Li &Guangjun Zhang (2024) Allocation and scheduling of deposition paths in a layer for multi-robot coordinated wire and arc additive manufacturing of large-scale parts, Virtual and Physical Prototyping, 19:1, DOI: 10.1080/17452759.2023.2300680
(؟�ξ���admin)
 Himed�u����ͬ��ɰĥ����3
Himed�u����ͬ��ɰĥ����3 ��ĩ�������Կ�����������
��ĩ�������Կ����������� Divergent��˾��3D��ӡ��
Divergent��˾��3D��ӡ�� ����ǻ�t�WԺ������3D��
����ǻ�t�WԺ������3D�� ��������٘���Ѫ�����
��������٘���Ѫ����� �Ƅ�ճ�Y�����䣨�T��/��
�Ƅ�ճ�Y�����䣨�T��/��������
- ��Himed�u����ͬ��ɰĥ����3D��ӡ⁺Ͻ�
- ����ĩ�������Կ�����������Ͻ��^�Y��
- ��Divergent��˾��3D��ӡ���g����܇��
- ������ǻ�t�WԺ������3D��ӡ�����ƽM��
- ����������٘���Ѫ������MƤ����ֲ��
- ���Ƅ�ճ�Y�����䣨�T��/����/�մɣ�3D��
- �����̻����w�����c3D�����ӡ�ںϣ��F��
- ���X�����������죺���ڿɳ��m��ҕ�ǵ���
- ���Ϻ��������픿��������պ��������
- ��3D��ӡ������������ڣ��༉�Y���{���c
 �x�^�����ۻ�����
�x�^�����ۻ����� ���;ۺ���3D��ӡ
���;ۺ���3D��ӡ 6K Additive����
6K Additive���� ��δ�����������
��δ����������� �Č�����������a
�Č�����������a 3D��ӡ�ڿ�ǻ�ޏ�
3D��ӡ�ڿ�ǻ�ޏ����c����
- ��3D��ӡ������ܶȺ����D��������x��
- ���Ź�ʮ�H��ʲô��Ф���~�Z���g����䌍
- ��������R�t���g��ʲô��Ф����һ�����
- �����^¶β��ʲô��Ф����һ������_��Ф
- ���˶�֮�Ŵ�һ�����_��Ф���~�Z��ጽ��x
- ��ĮĮˮ���w������ʲô��Ф����һ�����
- ��������R�t���g�´�һ������_��Ф����
- �����^¶β�´�һ������_��Ф�����x���
- ��ĮĮˮ���w������һ�ʴ_��Ф����ʲô��
- ���C������̻�3D��ӡ���g��������֬���_


