�о��ˆT3D��ӡ�܉��w�˷��ϵK�Ķ���Ⱥ�C����

3D ��ӡ������Ⱥ�C���ˡ��DƬ����ʥĸ��W��
����Ȼ���l��Ⱥ�w�C����
�о��ˆTԽ��Խ��؏���Ȼ�缰�������О��м�ȡ�`�У�����N�����_�l���к�ˮ�C���ˡ�Ȼ�����_�l���д�Խ���s���κͿ˷��ϵK�����ęC���˾��������ԡ��e�ǣ�һЩ�о��ˆTԇ�D�L�ƺ�ģ������������Щ���ԽM�����w��ʽ�ۼ���һ��Ą�����О飬����ρȺ���BȺ���~Ⱥ���M��ԇ�D�����@�N��Ȼ�ļ��w�ǻۣ���������Ⱥ�w�C����ͨ�����h�̿��ƻ� GPS �����ģ��������ԽM���ġ�
���� 2014 �꣬���� CoCoRo�����w�J֪�C���ˣ��Ŀ��һ���֣�3D ��ӡ�ͱ����ڞ麣��h������Ⱥ�C���ˡ�ԓ�Ŀ�����������W��W�ą��c����K�γ��� 40 �� 3D ��ӡ���͝�ͧ�C���ˣ��������ԅfͬ��������Џ��s���΄ա�
����������W��һ���о�С�M��ԓ�I������ǰ�~�M��һ�����ɹ��� 3D ��ӡ��һȺ��ܛ�ęC���~�������܉��ڛ]�� Wi-Fi �� GPS ��������r���ԏ��s��ģʽ��Ӿ���C���˵��Խo������Կ����������������ں���h���е����B�O�y���ã���t��o���M�롣
Ŀǰ����Ⱥ�ĵ���C���˃H�����������εĭh����Ozkan-Aydin �f������ԭ����ȱ���������s���ε��\����������ˣ��� 2020 ��������_ʼ�M���о��͌��ԏ��Ƅ���Ⱥ����ԽM���О飬�����Ⱥ�C���˵�������

����ƌW�ҵ����~���l�ęC��������˔z���^���{ɫ LED���Ɏ���������ˮ��������Ƭ�����ԽM��ϵ�y�о�С�M��
3D��ӡȺ�C����
Ozkan-Aydin ���о������@��һ��ǰ�ᣬ�����C����֮�g�������B�ӿ�����������ϵ�y���Ƅ��Ժ��������ı��|���v�����ij���ض��΄ճ����ˆ��C���˵�������������\���w���t�C���˕�������B�ӣ��γ�һ������Ķ���ϵ�y����ͬ����������Ozkan-Aydin ����f������Λρ�ռ����\ݔ���w�r����������ϵK��ԓС�M����ͬŬ���˷�ԓ�ϵK�����磬���·�������g϶���������γ�һ���������Ա�����Λρ���Դ�Խ�����@�����@��о����`�Ё�Դ��ͨ�^�C���˼��g���҂��܉���õ��˽��@Щ����ϵ�y�ĄӑB�ͼ��w�О飬��̽���҂�δ������܉�ʹ���@�N���g����
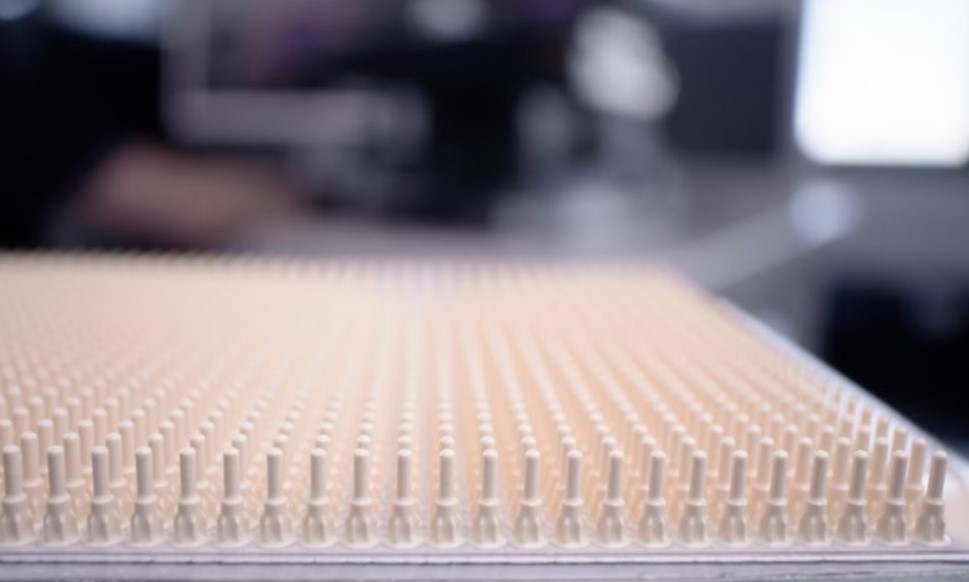
���˄�������Ⱥ�w��Ozkan-Aydin ʹ�� 3D ��ӡ�C���a���L���� 15 �� 20 ����֮�g�ĵͳɱ�����C���ˡ�ÿ���C���˶������䇾ۺ���늳ء�����������������������������Ĺ�������⣬ÿ���C���˵�����ͱ��涼�Ѓɂ������|����������ʹ�����܉�����Ⱥ�w�е����������ϡ�ÿ���C���˶��� 3D ��ӡ�ģ����Ă��`����ȣ����� Ozkan-Aydin ���f�����@��C�����ṩ��һ���̶ȵġ��Cе���ܡ������p���ˌ��~��������������㲻��Ҫ�~��Ă�������z�y�ϵK�����Ȳ����`���������ڙC����ֱ�ӏ�������߅�Ƅӣ������f�� ���������Ԝyԇ·���ϵĿp϶�������w�һ���������Ϊ��Ƅ����w�����B�����ڲ�ͬ��͵ĭh���й�ͬ�Ƅӌ���
�yԇ��Ⱥ�C����
�ڌ�ÿ���C�����M�� 3D ��ӡ��Ozkan-Aydin �yԇ�˙C�����ڲݵء����w��ʹ�ë��̺�ȵ������Լ��˷����~�����ӵ��ϵK��������������ٻ����ϵ�ƽ̹�����Ϝyԇ�C���ˣ���ʹ�ý^����ĭ��ľ�K��������������ĵ��Ρ������C���˿����ϵK���ϕr������Ⱥ�е������C���˰l����̖��Ȼ������ͨ�^�����|���������B����һ�����ṩ֧�ֲ��ɹ��˷��ϵK����Ρ��mȻ Ozkan-Aydin ���J���ęC����Ⱥ�OӋ���д����M�����������@��о��������ڞ��܉��m�������AҊ�����ĵͳɱ���Ⱥ���OӋ�ṩ��Ϣ�����AӋ�����о����������_�l�܉���ЬF�������΄յ�Ⱥ�w�C���ˣ������Ѿ��Єӡ��\ݔ���w���h���O�y������̫��̽����
�Ї�3D��ӡ�W�c�u��չ��δ����Ozkay-Aydin ��ͨ�^�Mһ��̽��Λρ�Ͱ�ρ�����x�ļ��w�����W���������о����c�������Ⱥ�C����ϵ�y�Ŀ��ơ����к̈́��������ϡ����˸��M�C���˃Ȳ���늳ؼ��g��δ���Ĺ��������������ϸ���Ă������������늙C��ͬ�r����������С�ߴ硣�����ڹ����Լ�Ⱥϵ�y��늳ؼ��g��Ҫ���M���҂���Ҫ�܉��ṩ���������С��늳أ�������r�¿��Գ��m 10 С�r���ϡ�
�Ї�3D��ӡ�W���g���£�
(؟�ξ���admin)
 �������M�մɹ�˾ʹ��Lith
�������M�մɹ�˾ʹ��Lith Xenia�M܊�������������
Xenia�M܊������������� �о��ˆT����3D��ӡ��ģ��
�о��ˆT����3D��ӡ��ģ�� ����Brooks�c���պ����_�l
����Brooks�c���պ����_�l ��AHM����3D��ӡ�黼�߶�
��AHM����3D��ӡ�黼�߶� MB Therapeutics�cLynxter
MB Therapeutics�cLynxter- ���������M�մɹ�˾ʹ��Lithoz���g��һ��
- ��Xenia�M܊��������������Ј����{�誚
- ���о��ˆT����3D��ӡ��ģ���_�l��������
- ������Brooks�c���պ����_�l�����ܸ���3D
- ����AHM����3D��ӡ�黼�߶��ơ�һ��һ��
- ��MB Therapeutics�cLynxter�������Ƴ��
- ����������������ʹ��3D��ӡ����߳�����
- ��HYP3D�Ŀ�����մ�3D��ӡ���a�߉����
- ���Ĵ����������������Ƅ�iLAuNCH�Ŀ��
- ��Restor3dʹ��Formlabs 3D��ӡ�턓����
 ������܊���M3Dɰ
������܊���M3Dɰ 3D��ӡ���Ի�����
3D��ӡ���Ի����� �����ݿ����tԺ��
�����ݿ����tԺ�� ��ʿ�m�Ƽ���W3D
��ʿ�m�Ƽ���W3D ȫ��3D��ӡ������
ȫ��3D��ӡ������ PSAS�ɹ��l��3D��
PSAS�ɹ��l��3D��- ��HueForge���Sˇ�g��ʹ��3D��ӡ��������
- ��15��3D��ӡ����܊���ð���
- ����ȿ��Y��2021���Ї����պ����I��3D��
- ��ģ��3D��ӡ����������ģ�����p��һ�w��
- ������Brooks�c���պ����_�l�����ܸ���3D
- ����AHM����3D��ӡ�黼�߶��ơ�һ��һ��
- ��MB Therapeutics�cLynxter�������Ƴ��
- ��Xenia�M܊��������������Ј����{�誚
- ������߀��FDM��ӡ���������о��ˆT����
- ���P�cȫ�����̘I����3D��ӡ�g�ں���


