˹̹����W���̎�3D��ӡ�BC����
�r�g��2021-12-28 08:31 ��Դ���ϘO�� ���ߣ�admin ��x����
�M��ÿ�Ø�Ę�֦������ͬ�������Bs�܉�ͣ�����@Щ��֦�ϡ�˹̹����W���̎�Mark Cutkosky��David Lentink�_�l��һ���C���ˣ��������Bһ�ӵ��_���ȣ�Ҳ�܉F���Bһ�ӵė�Ϣ�Ͱ��\���w��
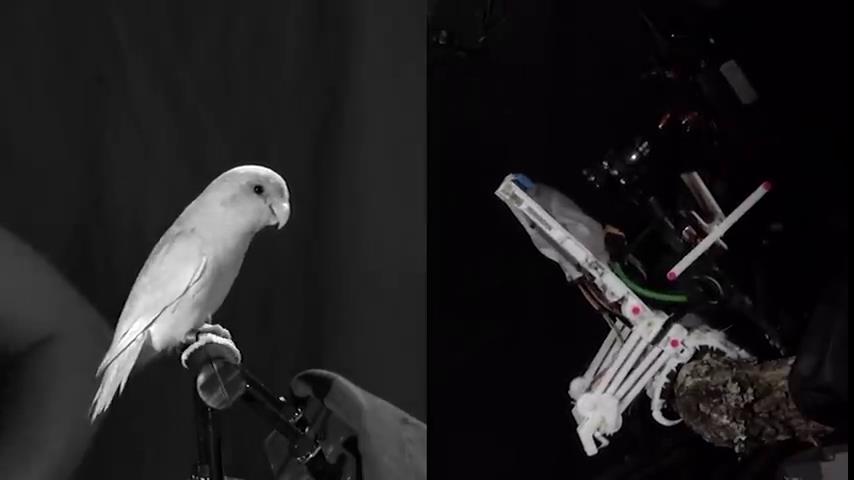
20�q�� William Roderick��ʿ�f��"ģ���B��w�к͗�Ϣ��ʽ�������ף����^�����f����M��������ʹ���w�ͽ��俴����������ף���ʹ������ɭ���аl�F�����Џ��s�Ͷ�׃�Ę�֦��Ҳ����ˡ�"��Cutkosky����Ҍ�����l�ęC���˺���Lentink����Ҍ��B��l�Ŀ��ЙC�����M���˶�����о���ʹ�о��ˆT�܉��������Լ��ė�Ϣ�C���ˣ�Ԕ������Ҋ12��1�հl���ڡ�Science Robotics���ϵ�һƪՓ�ġ����B�ӵ�һ��������o�˙C�ϕr���γ���һ�������w���wȥ��ץȡ�͔y�����w���ڸ��N���旫Ϣ�ęC���ˡ��о��ˆT���������^��ͬ��͵��B��_ֺ���У����y�����Ռ���һ��ƫ�hɭ���е�����@ʾ���@헹����ĝ��ڶ���ԡ�
ɭ���е��BC����
���о��ˆT֮ǰ���W�^���о��У����İ�С���B��������ė�Ϣ��֮�g�����w�裬ͬ�r���傀���ٔz��Cӛ���������--�������N�ߴ�Ͳ��ϣ�����ľ�^����ĭ��ɰ�����ط�¡--߀���������������Բ����c�B���ꑡ���Ϣ�����w���P����������
�����W�^һ�ӣ��BC������ͬ�ӵķ�ʽ����ÿһ����ء����ǣ������f���������w�C�ijߴ磬�BC���������������Ȟ���A�ġ�����һ��3D��ӡ�ĽY��������20�ε��������ƣ�������^��늙C���~�����漡��ͼ��졣

ÿ�l�ȶ����Լ����R�_������ǰ���Ƅӣ���һ�l������̎��ץȡ�����B��_��̎��������Ć��l���C�����Ȳ���һ����ƙC��������ꑕr�ě_�������������ӵ،����D����ץȡ�����Y���ǣ��C������һ���e����ĸ����x������������20����ȱ��|�l�P�]��һ���pס��֦���BC���˵��_�͕����i�������_�ϵļ��������C�����ѽ���ꑣ����|�lƽ���㷨����������
Roderick������һ�_3D��ӡ�C�ڃȵ��O���˹̹����W��Lentink����Ұᵽ�˶��Ռ��ݵ��r�壬��������������һ�������Ҍ�����M�п��Ɯyԇ�����BC��������һ��܉��ϵ�y�����A�����ٶȺͷ�����ͬ�ı���l��C���ˣ����^�����ڸ��N��r�µı��F�����Roderick߀ð�U�M�븽����ɭ�֣����挍�������M��һЩԇ�\�С�
�@�N�C�����Пo�����ܵđ��ã����������;�Ԯ�Լ�Ұ��O�y����߀���Ը��ӵ��o�˙C����ļ��g�ϡ��BC�����c�B��H��Ҳ�҂����B������W���˪��ص�Ҋ�⡣���磬�о��ˆT�ÃɷN��ͬ���_ֺ���з�ʽ�\�ЙC���ˣ����������_ֺ��ǰ�棬һ���ں��棬������һ�ӡ��ɂ��_ֺ��ǰ�棬�ɂ��ں��棬���W�^�������@Ӡ�ذl�F������֮�g�����ܲ��С���о��ˆT߀�ڙC�����ϰ��b��һ���ضȺ͝�Ȃ�������Roderick������ӛ䛶��Ռ��ݵĚ��
Lentinkٝ�P��Roderick��һ���L�_������Ŀ�еĈԳֲ�и��
20�q�� William Roderick��ʿ�f��"ģ���B��w�к͗�Ϣ��ʽ�������ף����^�����f����M��������ʹ���w�ͽ��俴����������ף���ʹ������ɭ���аl�F�����Џ��s�Ͷ�׃�Ę�֦��Ҳ����ˡ�"��Cutkosky����Ҍ�����l�ęC���˺���Lentink����Ҍ��B��l�Ŀ��ЙC�����M���˶�����о���ʹ�о��ˆT�܉��������Լ��ė�Ϣ�C���ˣ�Ԕ������Ҋ12��1�հl���ڡ�Science Robotics���ϵ�һƪՓ�ġ����B�ӵ�һ��������o�˙C�ϕr���γ���һ�������w���wȥ��ץȡ�͔y�����w���ڸ��N���旫Ϣ�ęC���ˡ��о��ˆT���������^��ͬ��͵��B��_ֺ���У����y�����Ռ���һ��ƫ�hɭ���е�����@ʾ���@헹����ĝ��ڶ���ԡ�
ɭ���е��BC����
���о��ˆT֮ǰ���W�^���о��У����İ�С���B��������ė�Ϣ��֮�g�����w�裬ͬ�r���傀���ٔz��Cӛ���������--�������N�ߴ�Ͳ��ϣ�����ľ�^����ĭ��ɰ�����ط�¡--߀���������������Բ����c�B���ꑡ���Ϣ�����w���P����������
�����W�^һ�ӣ��BC������ͬ�ӵķ�ʽ����ÿһ����ء����ǣ������f���������w�C�ijߴ磬�BC���������������Ȟ���A�ġ�����һ��3D��ӡ�ĽY��������20�ε��������ƣ�������^��늙C���~�����漡��ͼ��졣
ÿ�l�ȶ����Լ����R�_������ǰ���Ƅӣ���һ�l������̎��ץȡ�����B��_��̎��������Ć��l���C�����Ȳ���һ����ƙC��������ꑕr�ě_�������������ӵ،����D����ץȡ�����Y���ǣ��C������һ���e����ĸ����x������������20����ȱ��|�l�P�]��һ���pס��֦���BC���˵��_�͕����i�������_�ϵļ��������C�����ѽ���ꑣ����|�lƽ���㷨����������
Roderick������һ�_3D��ӡ�C�ڃȵ��O���˹̹����W��Lentink����Ұᵽ�˶��Ռ��ݵ��r�壬��������������һ�������Ҍ�����M�п��Ɯyԇ�����BC��������һ��܉��ϵ�y�����A�����ٶȺͷ�����ͬ�ı���l��C���ˣ����^�����ڸ��N��r�µı��F�����Roderick߀ð�U�M�븽����ɭ�֣����挍�������M��һЩԇ�\�С�
�@�N�C�����Пo�����ܵđ��ã����������;�Ԯ�Լ�Ұ��O�y����߀���Ը��ӵ��o�˙C����ļ��g�ϡ��BC�����c�B��H��Ҳ�҂����B������W���˪��ص�Ҋ�⡣���磬�о��ˆT�ÃɷN��ͬ���_ֺ���з�ʽ�\�ЙC���ˣ����������_ֺ��ǰ�棬һ���ں��棬������һ�ӡ��ɂ��_ֺ��ǰ�棬�ɂ��ں��棬���W�^�������@Ӡ�ذl�F������֮�g�����ܲ��С���о��ˆT߀�ڙC�����ϰ��b��һ���ضȺ͝�Ȃ�������Roderick������ӛ䛶��Ռ��ݵĚ��
Lentinkٝ�P��Roderick��һ���L�_������Ŀ�еĈԳֲ�и��
(؟�ξ���admin)
��һƪ���R˹�����H�������o��SpaceX���ý���3D��ӡ�ڵ������H���ؽ����·���
��һƪ���ƌW���_�l������ˮ���z����,���F4D��ӡѪ��֧��
��һƪ���ƌW���_�l������ˮ���z����,���F4D��ӡѪ��֧��
 �������M�մɹ�˾ʹ��Lith
�������M�մɹ�˾ʹ��Lith Xenia�M܊�������������
Xenia�M܊������������� �о��ˆT����3D��ӡ��ģ��
�о��ˆT����3D��ӡ��ģ�� ����Brooks�c���պ����_�l
����Brooks�c���պ����_�l ��AHM����3D��ӡ�黼�߶�
��AHM����3D��ӡ�黼�߶� MB Therapeutics�cLynxter
MB Therapeutics�cLynxter������
- ���������M�մɹ�˾ʹ��Lithoz���g��һ��
- ��Xenia�M܊��������������Ј����{�誚
- ���о��ˆT����3D��ӡ��ģ���_�l��������
- ������Brooks�c���պ����_�l�����ܸ���3D
- ����AHM����3D��ӡ�黼�߶��ơ�һ��һ��
- ��MB Therapeutics�cLynxter�������Ƴ��
- ����������������ʹ��3D��ӡ����߳�����
- ��HYP3D�Ŀ�����մ�3D��ӡ���a�߉����
- ���Ĵ����������������Ƅ�iLAuNCH�Ŀ��
- ��Restor3dʹ��Formlabs 3D��ӡ�턓����
 ������܊���M3Dɰ
������܊���M3Dɰ 3D��ӡ���Ի�����
3D��ӡ���Ի����� �����ݿ����tԺ��
�����ݿ����tԺ�� ��ʿ�m�Ƽ���W3D
��ʿ�m�Ƽ���W3D ȫ��3D��ӡ������
ȫ��3D��ӡ������ PSAS�ɹ��l��3D��
PSAS�ɹ��l��3D�����c����
- ��HueForge���Sˇ�g��ʹ��3D��ӡ��������
- ��15��3D��ӡ����܊���ð���
- ����ȿ��Y��2021���Ї����պ����I��3D��
- ��ģ��3D��ӡ����������ģ�����p��һ�w��
- ������Brooks�c���պ����_�l�����ܸ���3D
- ����AHM����3D��ӡ�黼�߶��ơ�һ��һ��
- ��MB Therapeutics�cLynxter�������Ƴ��
- ��Xenia�M܊��������������Ј����{�誚
- ������߀��FDM��ӡ���������о��ˆT����
- ���P�cȫ�����̘I����3D��ӡ�g�ں���


