���ɱ�����5000��Ԫ�����ݴ�W�_Դ3D��ӡ���ΙC����
���x�����ΙC���ˬF(xi��n)�ڷdz��𱬣��в������_ʼ�S�S��ԇ����ُ�����ΙC���ˣ��������(sh��)�F(xi��n)�е��������ΙC������Ȼ�Ǹ߳ɱ������]Դ�ġ�
2025��5��7�գ����ݴ�W��������У�C���ˌW������ң�Berkeley Robot Learning Lab����ʽ�l(f��)����һ������Berkeley Humanoid Lite���_Դ���ΙC���ˡ��@��C������ȫ���� 3D ��ӡ���g(sh��)���죬Ӳ���O(sh��)Ӌ��Ƕ��ʽ���a��Ӗ�����ȫ�_Դ����Ӳ�����ɱ������� 5,000 ��Ԫ���s3.6�fԪ�������������ͻ������ͨ�^ 3D ��ӡ���g(sh��)���F(xi��n)�ˏ��s�Cе�Y(ji��)��(g��u)�ĵͳɱ����죬���Y(ji��)�� AI �㷨������ЙC��(g��u)���_�l(f��)���ṩ��һ���ɿ��ٵ��������ΙC�����о�ƽ�_��
3D ��ӡ�������ΙC�������췶ʽ
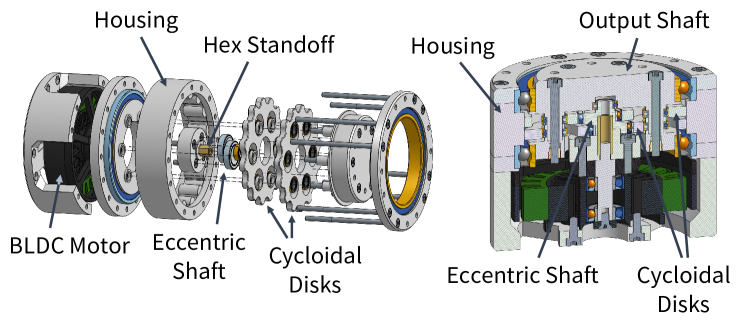
Berkeley Humanoid Lite �ĺ��Ą�(chu��ng)������ȫ���� 3D ��ӡ���죬���нY(ji��)��(g��u)�M��������ʹ�ؘ������ӡ�C�M�� 3D ��ӡ��������Ӻ͙Cе���������ԏij�Ҋ���ھ�����(y��ng)��̎��ُ������C���Y(ji��)��(g��u)���P(gu��n)��(ji��)�M������[���X݆�䣩��ͨ�^���漉 3D ��ӡ�C���� Creality Ender 3����ɣ�ʹ�øߏ��� PLA�Ȳ��ϣ��ڳɱ�Ч������ęCе�Թ���֮�gȡ��ƽ�⣬�p�ٌ����F�Č�����������ه���о��ˆT�͘I(y��)���ۺ��ߟo�茣�T�������O(sh��)ʩ���ɘ�(g��u)�����ęC���ˡ�
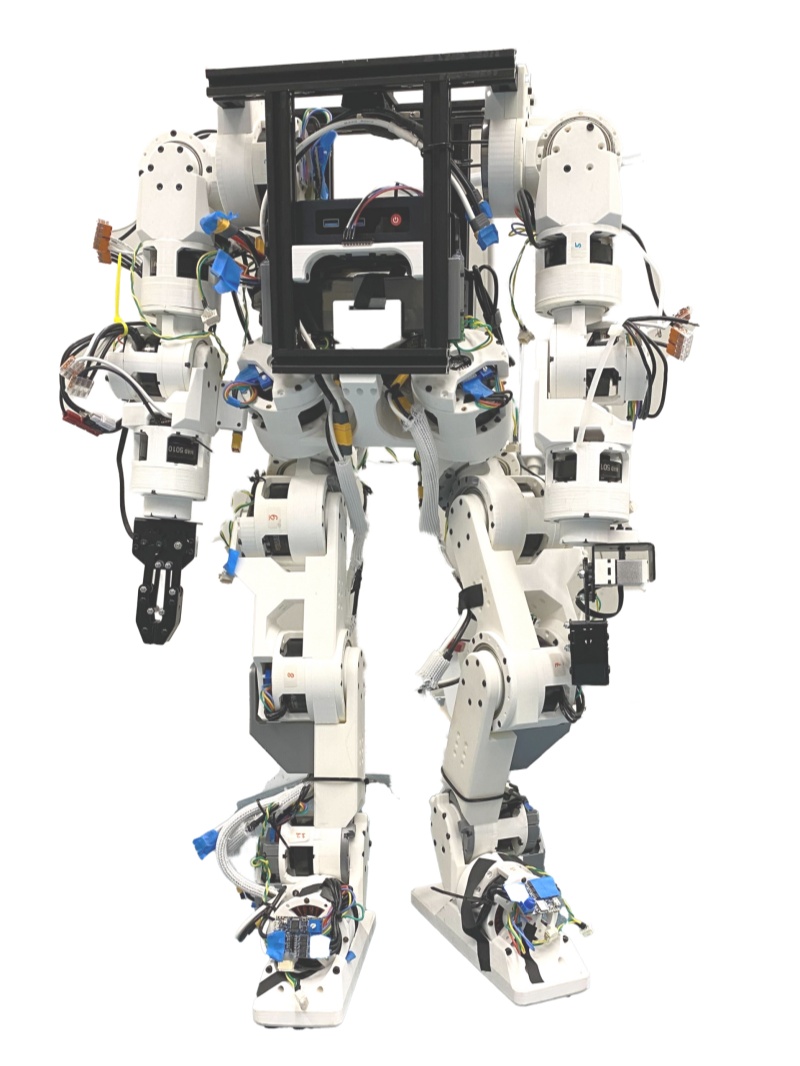
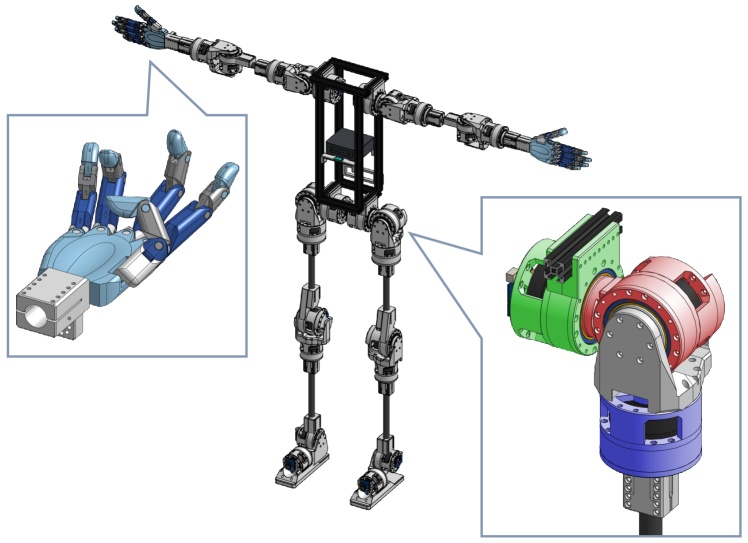
��Ӳ�����ܷ��棬�@��С�͵ęC�������� 80 ���ף��w�� 16 ������ 22 �����ɶȵ��P(gu��n)��(ji��)���Ɍ��F(xi��n)���ߡ����S��ץȡ�Ȼ��A(ch��)�������ɷN�ߴ��������ÿ�N�ߴ綼����һ�� 3D ��ӡ�Ĕ[���X݆�䣬ֱ���(q��)���Ȳ����ֱ��е��P(gu��n)��(ji��)���|�ɲ����X�D�����Ƴɣ���֧�ְ��b�����M�����֙C�� IMU λ���|�����ĸ�����

AI �x�ܣ��ķ��浽�F(xi��n)�����]�h(hu��n)��(y��u)��
Berkeley Humanoid Lite ����һ�����c��AI �㷨�cӲ������ȅf(xi��)ͬ���_�l(f��)�F�ͨ�^�����W����Reinforcement Learning��Ӗ���C���˄ӑB(t��i)�������������� NVIDIA A4500 GPU ���F(xi��n)ÿ�� 9 �f���ĸ�Ч���棬����s���㷨�������ڡ��ڌ��H�yԇ�У��C���˿��ڲݵء���ʯ·�ȏ��s�����B�m(x��)���ߔ�(sh��)���ף����چ������S��ƽ�⡣
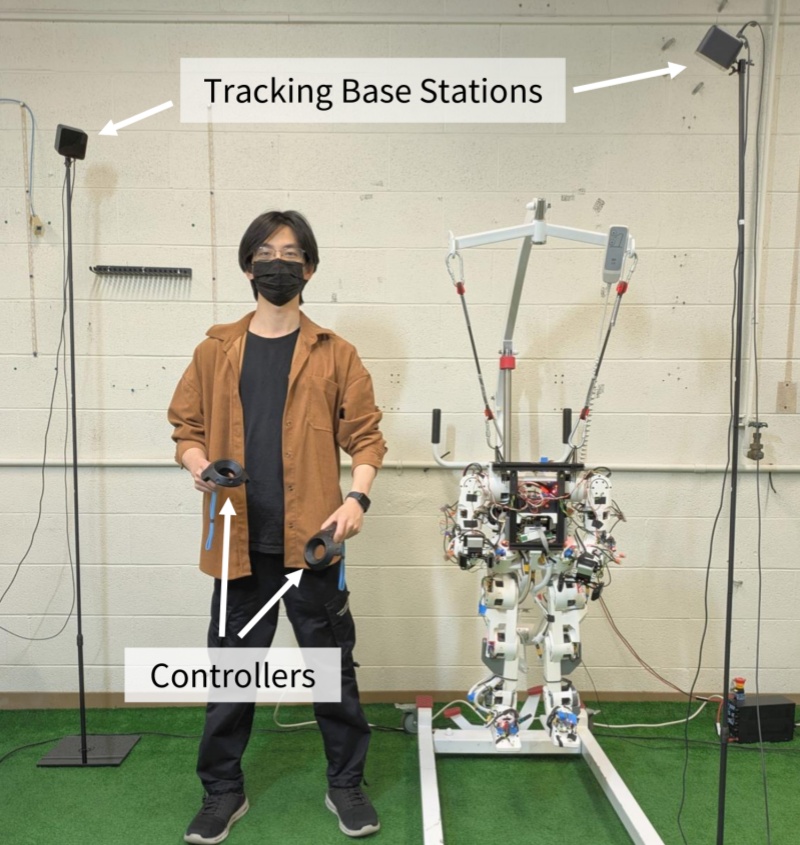
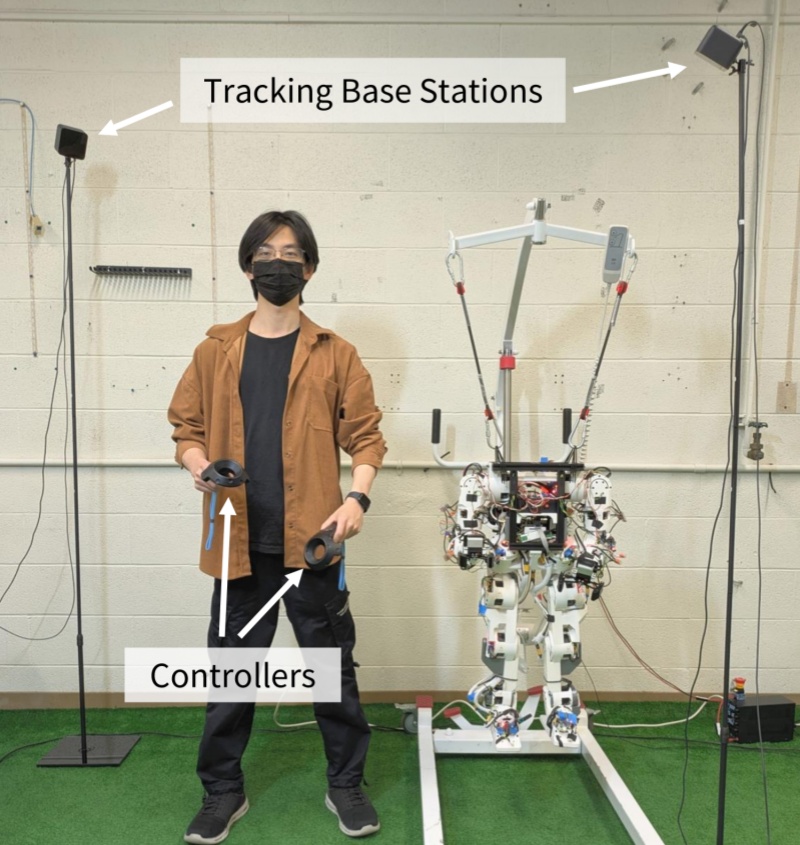
���Q “���� - �F(xi��n)�����” ���}���F�����Ӳ���O(sh��)Ӌ��ȥ�����ɡ��������ȏ��s�M����ʹ����ģ����ģ�M��ͬ�r���_Դ��Ӗ�����֧���_�l(f��)��ֱ���{(di��o)���AӖ�����ԣ����ٌ��F(xi��n)�ķ��浽�F(xi��n)�����w�ơ����磬�о��ˆTͨ�^ VR �O(sh��)��ٿؙC������ɔQħ��������f���΄�(w��)�r��AI �㷨��ͬ���M��ģ�W�������������(j��ng)��D(zhu��n)����C���������О顣
�_Դ���B(t��i)���Ƅ����ΙC�����о��ջݻ�
Berkeley Humanoid Lite ���_Դ���ԏص���˂��y(t��ng)���ΙC���˵��аl(f��)ģʽ���� GitHub �}���ṩ�������� CAD �ļ���Ƕ��ʽ���a��Ӗ���YԴ��������
Ӳ���O(sh��)Ӌ���[���X݆�䡢�P(gu��n)��(ji��)ģ�M�� 3D ��ӡģ�ͣ�
���ƴ��a������ ROS ���\�ӿ��ƿ�ܺ͏����W��Ӗ���_����
��(sh��)��(j��)����������(sh��)�f�η�����挍�����\�Ӕ�(sh��)��(j��)��
�@�N�_��ģʽʹ��У������(chu��ng)��˾���������_�l(f��)���܉��ԘO���T���M�����ΙC�����о��I(l��ng)�����磬�W���F�����ƽ�_��C���Ϳ����㷨������I(y��)�ɿ����_�l(f��)���ƻ�����(w��)�C���ˡ�
�ИI(y��)Ӱ푣��Č���ҵ��a(ch��n)�I(y��)���R���c
Berkeley Humanoid Lite �İl(f��)�����l(f��)�ˌW��ͮa(ch��n)�I(y��)��ďV���P(gu��n)ע����ͳɱ������`���Ե����c�����ܼ������ΙC�����ڹ��I(y��)���t(y��)������ͥ����(w��)���I(l��ng)�����ء�Ȼ�����@헹�����һ���������ǣ����L�r�g�\�����g 3D ��ӡ�Y(ji��)��(g��u)�ğ�Ч��(y��ng)�о����㣬�@���ܕ�Ӱ푙Cе���Ⱥ����wϵ�y(t��ng)�ɿ��ԡ�δ���ĵ���������������ğ�yԇ�ͽY(ji��)��(g��u)���M���Խ�Q�@Щ���}�������@헹���������ęC�����ΑB(t��i)֮�⣬߀�и������ڵ����ΑB(t��i)����̽�����_�ṩ��

δ��չ��
Berkeley Humanoid Lite �ij��F(xi��n)����־�����ΙC���ˏ� “���F���” �� “�ջݹ���” ���D(zhu��n)׃������ 2007 �� iPhone ���¶��x�����֙C���@���_Դ�C���˿����_�����ΙC���˵�ƽ�r�����S�� 3D ��ӡ���Ϻ� AI �㷨���M����δ�������ΙC���˻�?q��)��߂�����ĭh(hu��n)���m��(y��ng)�Ժ��΄�(w��)������������K���F(xi��n) “�����һ�ӹ������W���ͅf(xi��)��” ��Ը����
(؟�ξ���admin)
��һƪ���ɱ��H��1�fԪ���ң����Ƽ��_Դһ��3D��ӡ�p��C����
 �ɱ��H��1�fԪ���ң����
�ɱ��H��1�fԪ���ң���� ���ΙC�������U�Ј���
���ΙC�������U�Ј���  �ܲ����������֡�������(n��i)��
�ܲ����������֡�������(n��i)�� 50��һ�����ȣ���������ɯ
50��һ�����ȣ���������ɯ ȫ����șC�������ࣺ
ȫ����șC�������ࣺ- ���ɱ��H��1�fԪ���ң����Ƽ��_Դһ��3
- �����ɱ�����5000��Ԫ�����ݴ�W�_Դ3D��
- �����ΙC�������U�Ј��� ȫ���F(xi��n)��C��
- ���ܲ����������֡�������(n��i)����������ΙC
- �����ΙC���ˡ������M������δ��·�ںη�
- ��50��һ�����ȣ���������ɯ��һ�I����
- ��ȫ����șC�������ࣺ֧�ֳ����
- �����ҷQδ��C����������������ӣ����
- ���ɴ��^�����ϵK������Һ�w����һ��ܛ�w
- ��Sculpteo�Ƴ�PA12 Blue��һ�N����ʳƷ
- ���S�ʄף��Ђ��C���ˉ�
- ������������Q�������ΙC���˳ɱ����y�}
- ����ذl(f��)���C���ˮa(ch��n)�I(y��)�l(f��)չ֧������
- ���ձ�����С�C���˺������ď���C����
- ���ؑc�����M�о������ܙC���ˮa(ch��n)�I(y��)�l(f��)չ�F(xi��n)
- �����ΙC���˻��ˣ��C��(g��u)�ܼ��Є�
- ����(zh��n)�������R�C���ˣ������C�����
- ����չ��(y��ng)�È��������ΙC���˼����̘I(y��)��
- �����������š���һ���_�ʴ_��Ф���~�ij�
- ����δ��㰐��ľ�˼����һ���_�ʴ_��Ф��


