���ګC���ȽY(ji��)��(g��u)��3D��ӡ�������������ʽ����������
���Ԃ����������ڿɴ�����ӡ��˙C(j��)���������ܙC(j��)���˷���ĝ��ڑ�(y��ng)�ö��������о��dȤ��Ŀǰ�����ԉ������������ķN��Ҫ�Ă��ЙC(j��)�ƣ����ʽ������ʽ��Ħ���ʽ�͉��ʽ���������ʽ���������������Ƃ�ɱ��͡��Y(ji��)��(g��u)���Ρ��`���ȸߵă�(y��u)�c(di��n)����ˣ��о��ˆT��(du��)���ʽ�����������M(j��n)���������о���

![]() ������B
������B
�������ʽ������������ƽ�е�����늘O�͊A������֮�g�Ľ�늌ӽM�ɡ���ǰ���о�������ͨ�^�����ԉ����������Ľ�늌Ӄ�(n��i)��(g��u)���^�Y(ji��)��(g��u)�D�����ډ����¸����a(ch��n)��׃�Σ��Ķ���������ԉ�����������ͬ�r(sh��)���A���νY(ji��)��(g��u)���������Y(ji��)��(g��u)�������Y(ji��)��(g��u)��ɰ���Y(ji��)��(g��u)�ѱ���������(qi��ng)���Ԃ������Ă������ܡ�Ȼ����ʹ���T��ɰ���Y(ji��)��(g��u)��ģ���Ƃ�Ă��������в�Ҏ(gu��)�t���^�Y(ji��)��(g��u)��ʹ���y�Դ_����ͬһ�����Ƃ�ĉ����������������Ƶ����ܡ����⣬���ڴ�Ҏ(gu��)ģ������`�������Ԃ������O������(zh��n)�ԣ���Ҏ(gu��)�t���^�Y(ji��)��(g��u)������(d��o)����������������������(du��)�^�
�����Ƃ���������ԉ������������S���о��ˆT�������о����������Ԃ������IJ��ϡ����о�����Ҫ���Բ��ϰ��������z���۶��������飨PDMS����ˮ���z���������Ͼ��и߶����ԣ��܉��Ƃ�{�׳ߴ�ĽY(ji��)��(g��u)��ͨ�^ʹ���@Щ���Բ��ϣ��о��ˆT���Ԍ�(sh��)�F(xi��n)���߄�(chu��ng)���ԵĽY(ji��)��(g��u)ģʽ�������(sh��)���ʽ����������ʹ�ü��⼼�g(sh��)���o늼��z�������D(zhu��n)�Ʒ����혋(g��u)���^�Y(ji��)��(g��u)���M���@Щ�Y(ji��)���ṩ������ӡ����̵����ܣ����Ƃ��^�̺ĕr(sh��)����(f��)�s�ҳɱ��߰���
![]() ����c(di��n)
����c(di��n)
- �������O(sh��)Ӌ(j��)��һ�N���ڷ����C�����Y(ji��)��(g��u)�����ʽ�������������(y��n)�C�˷����Y(ji��)��(g��u)�O(sh��)Ӌ(j��)�ă�(y��u)�c(di��n)����ʹ��3D��ӡ���g(sh��)��(y��u)���˽Y(ji��)��(g��u)��������(sh��)��
- �ܫC�����͆��l(f��)�ĉ������������и��`���ȣ�0.75 kPa⁻¹���������Ԃ��з�����0�C280 kPa�����s80 ms�Ŀ���푑�(y��ng)�r(sh��)�g�ͳ�ɫ�������ԣ�24000��ѭ�h(hu��n)����
- ԓ�����������R(sh��)�e��ָ���������(bi��o)���O(ji��n)�y���w�\(y��n)��(d��ng)������ݔĪ��˹늴a��Ϣ��
![]() �D�Ľ���
�D�Ľ���
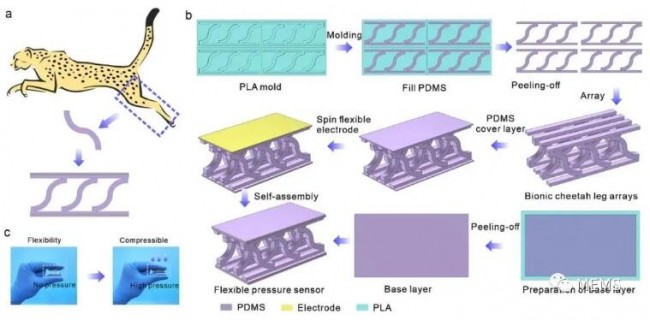 �D1��a�� �����������Y(ji��)��(g��u)�`�С���b�� ������������(zh��n)�����̈D����c�� ����������ʾ��D��
�D1��a�� �����������Y(ji��)��(g��u)�`�С���b�� ������������(zh��n)�����̈D����c�� ����������ʾ��D��
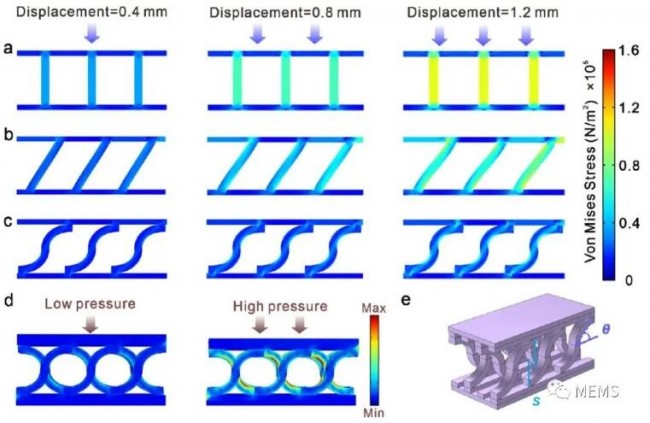 �D2 ������������ģ�M����ͬλ���µđ�(y��ng)���ֲ�����a���A������b���Aб�A�����ͣ�c�������C���ȡ���d�� �����������ڵ͉��߉��µ����S��(y��ng)���ֲ�����e�� ��������(y��u)������(sh��)ʾ��D��
�D2 ������������ģ�M����ͬλ���µđ�(y��ng)���ֲ�����a���A������b���Aб�A�����ͣ�c�������C���ȡ���d�� �����������ڵ͉��߉��µ����S��(y��ng)���ֲ�����e�� ��������(y��u)������(sh��)ʾ��D��
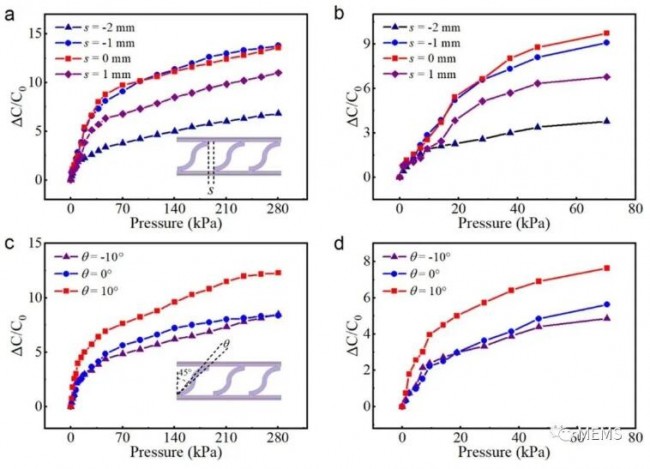 �D3��a��b�������Y(ji��)��(g��u)���g����(du��)���Ԃ������`���ȵ�Ӱ푡���c��d�������Y(ji��)��(g��u)�ăAб�ǶȌ�(du��)���Ԃ������`���ȵ�Ӱ푡�
�D3��a��b�������Y(ji��)��(g��u)���g����(du��)���Ԃ������`���ȵ�Ӱ푡���c��d�������Y(ji��)��(g��u)�ăAб�ǶȌ�(du��)���Ԃ������`���ȵ�Ӱ푡�
 �D4
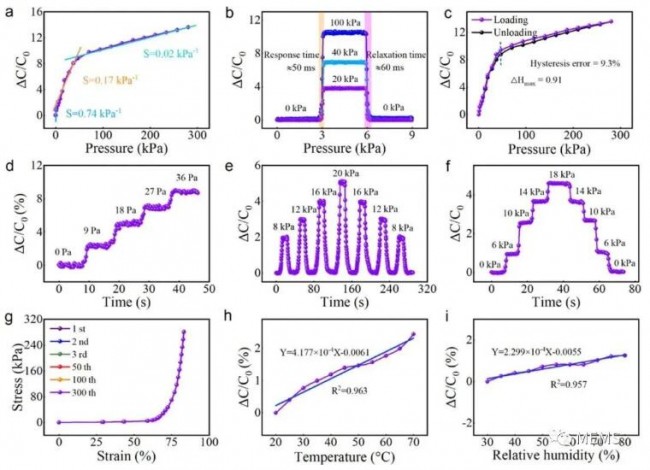
���������������Ա�������a�� �������������푑�(y��ng)��������b�� ������������20��40��100 kPa�����µ�푑�(y��ng)/�֏�(f��)�r(sh��)�g�քe��80��90
ms����c�� �����������Ĝ����`���9.3%����d�����Ԃ������ĵ͉��z�y����e�� ���Ԃ������Ŀ��؏�(f��)�ԡ���f��
���Ԃ������ڲ�ͬ�����µķ�(w��n)���ԡ���g�� ���Ԃ������đ�(y��ng)��-��(y��ng)׃��������h�� ���Ԃ������Ĝض����ܔ_��(d��ng)ԇ�(y��n)����i�� ���Ԃ������ĝ�ȸɔ_�yԇ��
�D4
���������������Ա�������a�� �������������푑�(y��ng)��������b�� ������������20��40��100 kPa�����µ�푑�(y��ng)/�֏�(f��)�r(sh��)�g�քe��80��90
ms����c�� �����������Ĝ����`���9.3%����d�����Ԃ������ĵ͉��z�y����e�� ���Ԃ������Ŀ��؏�(f��)�ԡ���f��
���Ԃ������ڲ�ͬ�����µķ�(w��n)���ԡ���g�� ���Ԃ������đ�(y��ng)��-��(y��ng)׃��������h�� ���Ԃ������Ĝض����ܔ_��(d��ng)ԇ�(y��n)����i�� ���Ԃ������ĝ�ȸɔ_�yԇ��
 �D5
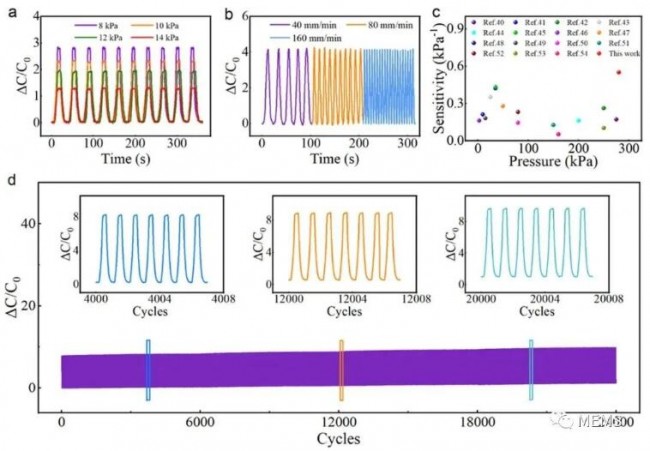
���������������ܱ�������a�� ���ʽ�����������ڲ�ͬ������8��10��12��14 kPa���µ����푑�(y��ng)���؏�(f��)�ԡ���b��
�������ڲ�ͬ���ʣ�40��80��160 mm/min���µ����푑�(y��ng)����c��
�����ʽ�������������`���Ⱥ������c�F(xi��n)���о��M(j��n)���˱��^����d�����ʽ����������24000��ѭ�h(hu��n)���;��Ԝyԇ��
�D5
���������������ܱ�������a�� ���ʽ�����������ڲ�ͬ������8��10��12��14 kPa���µ����푑�(y��ng)���؏�(f��)�ԡ���b��
�������ڲ�ͬ���ʣ�40��80��160 mm/min���µ����푑�(y��ng)����c��
�����ʽ�������������`���Ⱥ������c�F(xi��n)���о��M(j��n)���˱��^����d�����ʽ����������24000��ѭ�h(hu��n)���;��Ԝyԇ��
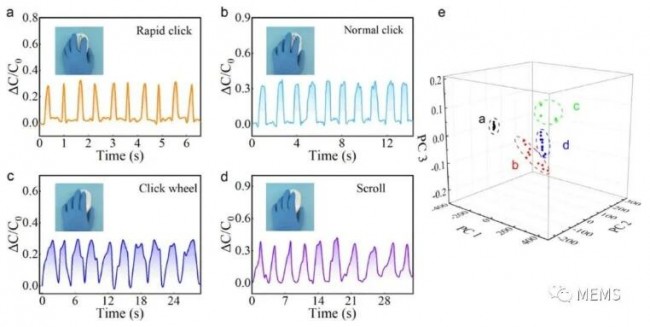 �D6 ������ָ�������(bi��o)�\(y��n)��(d��ng)�R(sh��)�e�ĉ�����������(y��ng)�ó���a�� ���(bi��o)�����c(di��n)��푑�(y��ng)��������b�� �����ٶ��c(di��n)�����(bi��o)푑�(y��ng)��������c�� �����c(di��n)��݆푑�(y��ng)��������d�� �L��(d��ng)���(bi��o)�L݆푑�(y��ng)��������e�� �Ă�(g��)��ָ���������(bi��o)��(d��ng)�������SPCA���
�D6 ������ָ�������(bi��o)�\(y��n)��(d��ng)�R(sh��)�e�ĉ�����������(y��ng)�ó���a�� ���(bi��o)�����c(di��n)��푑�(y��ng)��������b�� �����ٶ��c(di��n)�����(bi��o)푑�(y��ng)��������c�� �����c(di��n)��݆푑�(y��ng)��������d�� �L��(d��ng)���(bi��o)�L݆푑�(y��ng)��������e�� �Ă�(g��)��ָ���������(bi��o)��(d��ng)�������SPCA���
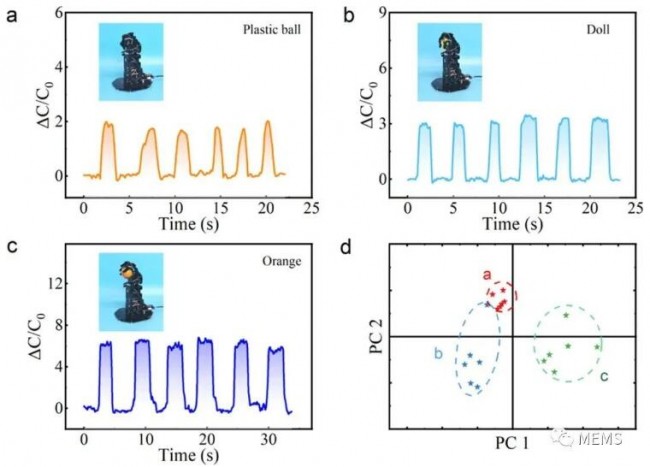 �D7 ���������������ܲٿv��������ץȡ��(du��)��a�� �A�o���ωK����b�� ץ��һ��(g��)���ޡ���c�� ץ��һ��(g��)���ӡ���d�� ���ܙC(j��)е��ץȡ���w�Ķ��SPCA���
�D7 ���������������ܲٿv��������ץȡ��(du��)��a�� �A�o���ωK����b�� ץ��һ��(g��)���ޡ���c�� ץ��һ��(g��)���ӡ���d�� ���ܙC(j��)е��ץȡ���w�Ķ��SPCA���
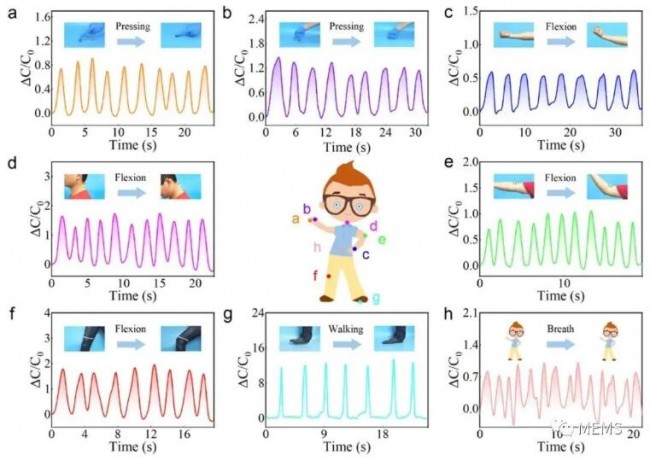 �D8 �������w�\(y��n)��(d��ng)�O(ji��n)�y�ĉ�������������a�� ��ָ�c(di��n)������b�� ȭ�^��������c�� ����������d�� �i����������e�� �ⲿ��������f�� ϥ�w��������g�� �_����������h�� ������
�D8 �������w�\(y��n)��(d��ng)�O(ji��n)�y�ĉ�������������a�� ��ָ�c(di��n)������b�� ȭ�^��������c�� ����������d�� �i����������e�� �ⲿ��������f�� ϥ�w��������g�� �_����������h�� ������
 �D9 �������������ڂ�ݔĪ��˹늴a��Ϣ����a�� �@26��(g��)��ĸ��(du��)��(y��ng)Ī��˹늴a����b�� ������������ݔĪ��˹늴a��Ϣ���C��������c�� ������������Ӌ(j��)��C(j��)�ӿ��@ʾ�l(f��)��Ī��˹늴a��Ϣ��LEG����
�D9 �������������ڂ�ݔĪ��˹늴a��Ϣ����a�� �@26��(g��)��ĸ��(du��)��(y��ng)Ī��˹늴a����b�� ������������ݔĪ��˹늴a��Ϣ���C��������c�� ������������Ӌ(j��)��C(j��)�ӿ��@ʾ�l(f��)��Ī��˹늴a��Ϣ��LEG����
��Դ l MEMS
(؟(z��)�ξ���admin)
��һƪ���ɹ��yԇ���D(zhu��n)����ȼ����RDC�����g(sh��)��GE�@�߳����ٰl(f��)��(d��ng)�C(j��)�аl(f��)ͻ�ƣ�
 Vertico�Ƴ��ɳ��m(x��)ģ�K��3
Vertico�Ƴ��ɳ��m(x��)ģ�K��3 ����ɣ�Ǵ�W(xu��)�аl(f��)3D��ӡ��
����ɣ�Ǵ�W(xu��)�аl(f��)3D��ӡ�� ��(du��)�Ȳ�ͬ��Դ�ljK��ֲ�
��(du��)�Ȳ�ͬ��Դ�ljK��ֲ� ��؛���ڡ��������M(f��i)���p��
��؛���ڡ��������M(f��i)���p�� ���������x���\(y��n)��(d��ng)�b�䣺Ca
���������x���\(y��n)��(d��ng)�b�䣺Ca ����CoAspire�cDivergent
����CoAspire�cDivergent
- ��Vertico�Ƴ��ɳ��m(x��)ģ�K��3D��ӡ����DIA
- ������ɣ�Ǵ�W(xu��)�аl(f��)3D��ӡ�ɴ����O(sh��)�䣺ͨ
- ����(du��)�Ȳ�ͬ��Դ�ljK��ֲ�3D��ӡ������
- ����؛���ڡ��������M(f��i)���p�룬��⁺Ͻ�3D
- �����������x���\(y��n)��(d��ng)�b�䣺Carbon�cReusch
- ������CoAspire�cDivergent��˾(li��n)���аl(f��)3
- ��ChristianaCare 3D��ӡ���������ί�Ƥ
- ��Alquist 3D����3D��ӡ���g(sh��)��Ч����֠�
- ��Vertico�Ƴ��ɳ��m(x��)ģ�K��3D��ӡ����DIA
- ������ɣ�Ǵ�W(xu��)�аl(f��)3D��ӡ�ɴ����O(sh��)�䣺ͨ
- ����(du��)�Ȳ�ͬ��Դ�ljK��ֲ�3D��ӡ������
- ����؛���ڡ��������M(f��i)���p�룬��⁺Ͻ�3D
- �����������x���\(y��n)��(d��ng)�b�䣺Carbon�cReusch
- ������CoAspire�cDivergent��˾(li��n)���аl(f��)3
- ��ChristianaCare 3D��ӡ���������ί�Ƥ
- ��Alquist 3D����3D��ӡ���g(sh��)��Ч����֠�
- ��CoAspire��Divergent���g(sh��)��˾��(sh��)�F(xi��n)3D��
- ��VICIS(li��n)��Carbon�Ƴ�NFL피�(j��)3D��ӡ�^��
 �ջݹ�˾�Ƴ��µ�
�ջݹ�˾�Ƴ��µ� �ÿ��_˹������
�ÿ��_˹������ ��܊���M(j��n)�h(yu��n)��3D��
��܊���M(j��n)�h(yu��n)��3D��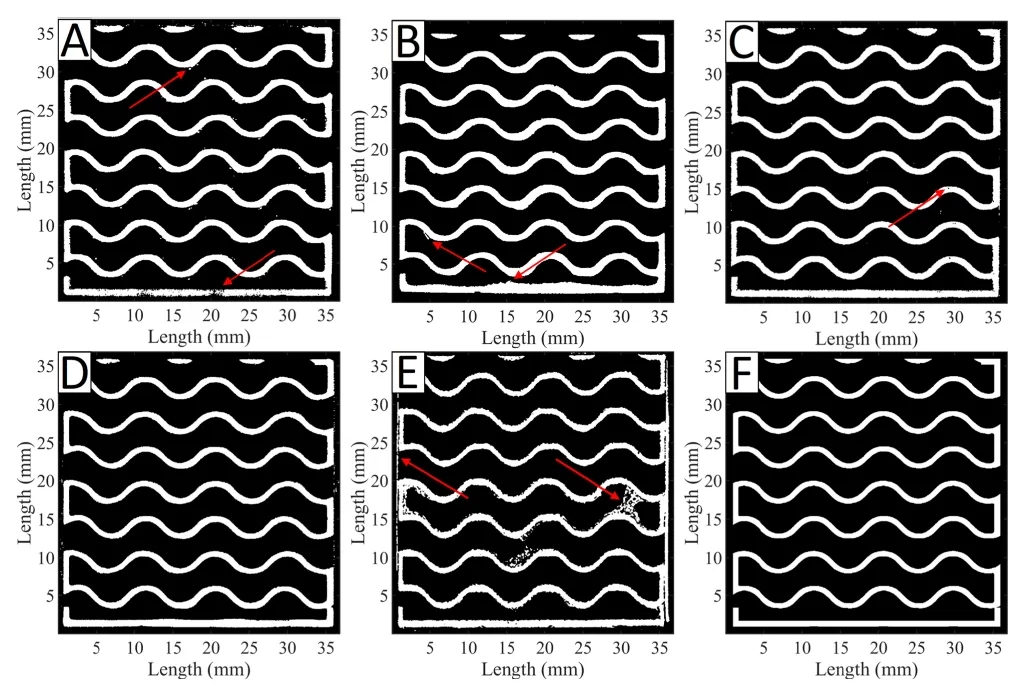 3D��ӡ�ğύ�Q��
3D��ӡ�ğύ�Q�� 3D��ӡ��(sh��)�F(xi��n)��̶�
3D��ӡ��(sh��)�F(xi��n)��̶� �炐�ȁ���W(xu��)����
�炐�ȁ���W(xu��)����- ��3D��ӡ��������3D��ӡ�P���������ij���
- ����3D��ӡ�C(j��)�����b���ˣ�����3d��ӡ��һ
- ���ƌW(xu��)���_�l(f��)��3D��ӡ���ԡ������족늳�
- ��600mm��ߴ�SLS 3D��ӡ�C(j��)��o�˾�܇܇
- ��Curiteva��(b��o)��Q3D��ӡ��С��PEEK�g�P
- ���Լ���(d��ng)����һ�_(t��i)ֻ��20��Ԫ��3D��ӡ��
- ���ձ�����ȫ������3D��ӡ��܇վ
- ���P�c(di��n)3D��ӡ���ޏ�(f��)������E�еĽ�(j��ng)�䰸��
- ���֙C(j��)��ע���ˣ��Ø�ݮ��+3D��ӡ�C(j��)����
- ���D�⣺3D��ӡ�������a(ch��n)����


