3D��ӡ���ڶ�������֪�ĸ����ԉ���ʽ����������
3D��ӡ���g��������Զ�������Y�������c���ѽ��ɞ��Ƅӄ��º͌��F���s�OӋ���P�I���ߡ����y�ĉ������������R�e��ͬ����ļ��d���r���ھ����ԣ��@��ҪԴ�������ͬ�Ե����ԡ����˿˷��@һ���𣬿ƌW�҂�һֱ��̽���܉�ʴ_�R�e���s������B�ĸ����ԉ�����������Ȼ�����F�е����췽���ڲ��ϺϳɺͽY���OӋ�ϴ��ڏ��s�Ժ�ȱ���`���ԣ�3D��ӡ���g�đ��Þ��@һ�����ṩ���µ�������ԡ�
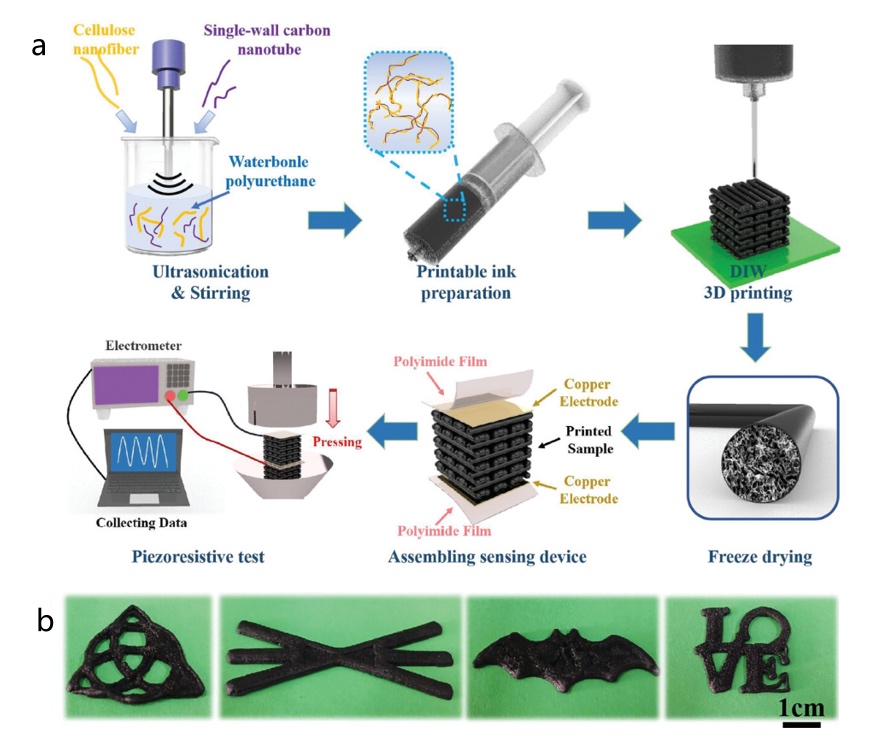
�Ĵ���W�ۺ����о���ͨ�^3D��ӡ���g�ɹ��_�l��һ�N���͵ĸ����ԉ��艺����������PPS���������ܴ����O������Ƥ�w���I��đ����_�����µĿ����ԡ�ԓ�о�������ֱ��īˮ���루DIW��3D��ӡ���g��ʹ�ú�ˮ�Ծ۰�����WPU�������w������īˮ���ɹ���ӡ���˾��ж��Ƹ�����“������”�Y����PPS��ͨ�^�{����ӡ�������о��ˆT�܉��p���{���������ĸ����ԣ������F���@�ķ����R�e������
����ͨ�^����φα�̼�{�ܣ�SWCNT�����w�S�ؼ{���w�S��CNF����WPU��Ȼ��ʹ�ø��ٻ�����M�з�ɢ���õ����|�ͺ���ī�����C��īˮ����׃���ܺ����ă���ģ������3D��ӡ�ɹ���������Y���ṩ�˱��C�����õ��ďͺ���ī�ć����ДD����ͨ�^���ӳ��e������������S���Π�S����ӡ�Ę�Ʒ�M�Ѓ���̎����ȥ��ˮ�ֲ�����3D���B�ף����M�b���ڂ����O�䣨�D1a������ӡ�˾����ض��OӋ�Ļ��B���d�Y�����D1b�����@Щ�Y�����H�p�ɣ�߀�������õĉ��s�֏��ԡ�ͨ�^����Ԫ������FEM��ģ�M���о����ڲ�ͬ������ʩ����ͬ�����r�ăȲ������ֲ���푑�λ��׃�����A�y�˽Y���ĸ��������ԡ�
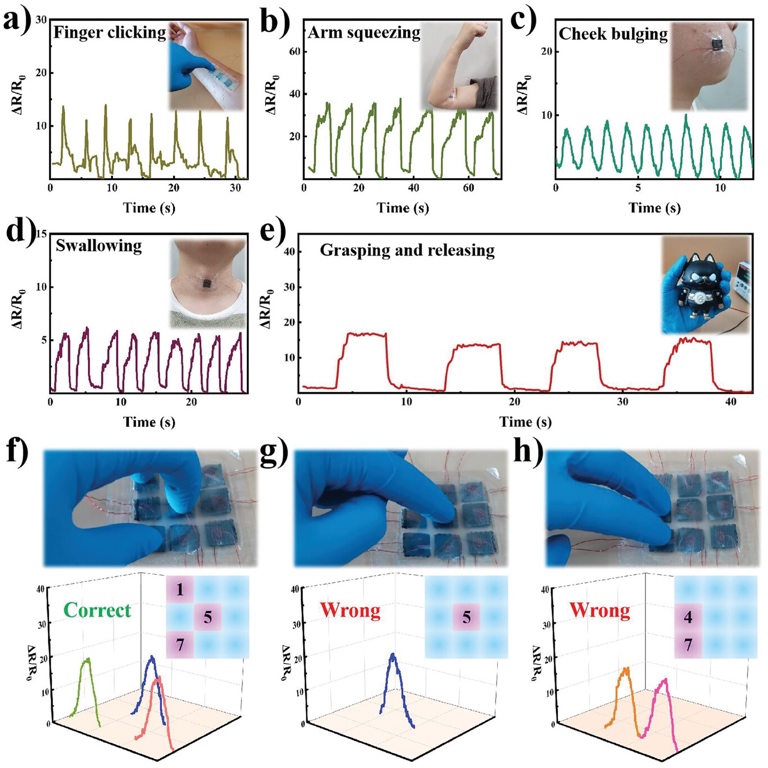
ͨ�^һϵ�Љ��s�yԇ���о��ˆT�u����3D��ӡWPU/SWCNT/CNF�ͺϺ��d�ĉ��s����-��׃�О�͉������ܡ��Y���@ʾ���c�K��Y����ȣ�3D��ӡ�ľ���Y�����и��ߵ��`���Ⱥ͉��������ԡ����⣬ͨ�^�Y���OӋ�������@������˂������ĸ����Ժͷ���푑��ԡ��о��F�߀չʾ��3D��ӡ��������ģ�M�C����Ƥ�w����ĝ��ڑ��ã���O�y��ָ�c�����D2a�����ֱ۔D�����D2b����Ę�a��Û���D2c�������ʣ��D2d���Ȅ��������⣬ͨ�^�����������ɵ����ܽM���i�У�չʾ�������˙C�������˹������I��đ��Ý������D2f��g��h����
�@��о����Hչʾ��3D��ӡ���g����������ܸ�����PPS����ĝ�����߀��δ���������O����˙C�����ṩ���µ�˼·���S��3D��ӡ���g�IJ����M�����҂����������ţ��@�N���͂����������t���O�y�������o�����C���˼��g���I��l�]��Ҫ���á�
�����īI��
Jingfeng Liu,Xuan Zhang,Jintao Liu et al. 3D Printing of Anisotropic Piezoresistive Pressure Sensors for Directional Force Perception. Advanced Science. 2024.
(؟�ξ���admin)
��һƪ���n���о��ˆT���3D��ӡ⁹�-196��C�͵͜؉����yԇ��δ�l���Y������
 �n���о��ˆT���3D��ӡ�
�n���о��ˆT���3D��ӡ� Ӣ���Ϲ����I��˾����
Ӣ���Ϲ����I��˾���� Խ��Vinmec�ɹ��������p��
Խ��Vinmec�ɹ��������p�� BվUP����30�f3D��ӡ��һ
BվUP����30�f3D��ӡ��һ ��ֹ����܇���ձ����ý���
��ֹ����܇���ձ����ý���- ���n���о��ˆT���3D��ӡ⁹�-196��C��
- ��3D��ӡ���ڶ�������֪�ĸ����ԉ���ʽ
- ��Ӣ���Ϲ����I��˾���Ȳ���3D��ӡ��
- ��Խ��Vinmec�ɹ��������p���������ߌ�ʩ
- ��BվUP����30�f3D��ӡ��һ����
- ����ֹ����܇���ձ����ý���3D��ӡ����
- ��Lemki Robotix�Ƴ�3D��ӡ����ԽҰ�C��
- ���ߜغϽ�3D��ӡ��е�������Ј��r���_1
- ��Ӣ��NHS��3D��ӡ���ijɹ���һ��75�q��
- ��Խ��Vinmec�t�����F���ȫ����С���g��
 Խ��Vinmec�t����
Խ��Vinmec�t���� ��ʡ�������R�_�T
��ʡ�������R�_�T ��ʿ�D�����Ƴ�
��ʿ�D�����Ƴ� �Ĵ�����Conflux
�Ĵ�����Conflux PPPL���̎�����3D
PPPL���̎�����3D �ջݹ�˾�Ƴ��µ�
�ջݹ�˾�Ƴ��µ�- ��3D��ӡ��������3D��ӡ�P���������ij���
- ����3D��ӡ�C�����b���ˣ�����3d��ӡ��һ
- ��600mm��ߴ�SLS 3D��ӡ�C��o�˾�܇܇
- ���ƌW���_�l��3D��ӡ���ԡ������족늳�
- ��Curiteva���Q3D��ӡ��С��PEEK�g�P
- ���Լ�������һ�_ֻ��20��Ԫ��3D��ӡ��
- ���ձ�����ȫ������3D��ӡ��܇վ
- ���P�c3D��ӡ���ޏ�������E�еĽ��䰸��
- ���֙C��ע���ˣ��Ø�ݮ��+3D��ӡ�C����
- ���D�⣺3D��ӡ�������a����


