�҇����аl������C���ˣ�����һ�l��Ҳ����������
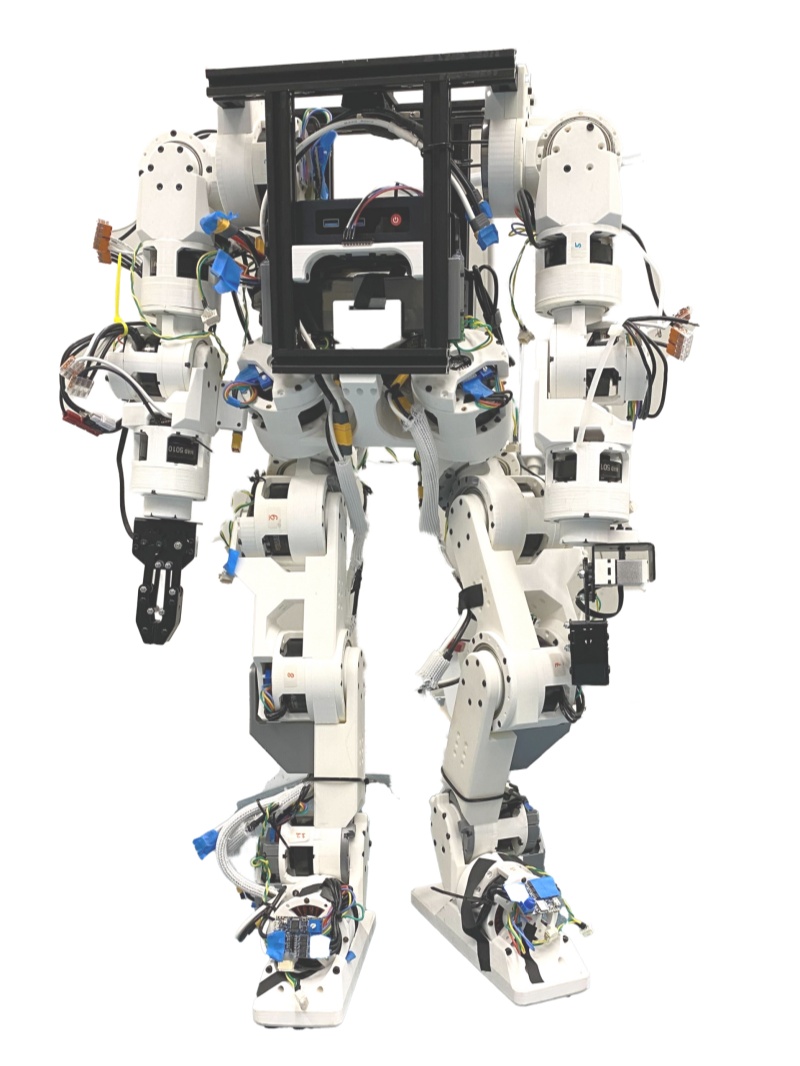
IT֮�� 11 �� 18 ����Ϣ������ҕ܊�������������҇������аl������C���ˡ�������C������ȣ�����C���˵ķ����Ը�������ʹż������һ�l��Ҳ�����^�m���ߡ�IT֮�ҏĈ���Ы@Ϥ������C�������ߕrÿ��̧���l�ȣ�ʣ�����l���܉��γ�������֧�����w�����w���� 6 ����ȫ�ɿص����ɶȣ��߂䷀���ԡ�ƽ���ԡ����d�ԡ�
���Ϻ���ͨ��W�Cе�c�������̌WԺ�vϯ���ڸ߷��B����δ��������C���˷��棬�����������һ�w���ęC���ˣ�ϣ�����ں����I��ȡ���|��ͻ�ơ��@������C���ˁ����Ϻ���ͨ��W�Cе�c�������̌WԺ�߷���ڈFꠡ��߷���ڱ�ʾ��“�҂������@���������һ�w���ęC���ˣ�ϣ���҂��ں����I����һ���|��ͻ�ơ�”ԓ�F��ڽ��� 6 �¾�����һ��“���l��”��ä�C���ˣ�����ҕ�X�h����֪���ܣ�������������Ŀ�ĵء��ӑB����ϵK���R�e�t�G���ȣ����M�댍�yԇ�A�Ρ�

�߷���ڈF��ڌ�ä�C�����ϼ����� �X���|�X�����X���N������ʽ�����Fä���c��ä����C����֮�g���˙C���ܸ�֪�c협����О顣�C���˿ɸ���ä�˵��Z��ָ�����푑����ʴ_�R�e��Ŀǰ�Z���R�e�ʴ_�ʞ� 90% ���ϣ�푑��ٶ��� 1 ��֮�ȡ�
�C���˿�ͨ�^�Z���°lָ�ͬ�r���r�������ߺͭh����r����Ϣ�����F�p�����ܽ�����ä�ȿɌ��Fä���c�C����֮�g�����X��������ä���ṩ���������D�����أ�������ǰ�M���D��ͬ�rä�˿�������ä�ȁ�ӑB�{���C���˵������ٶȡ�
Ŀǰ�C��������ٶ��_ 3m/s���܉�M��ä�����ߡ����ߡ��ܲ�������������Ī��ؘ��̓��ݴ_���C���˿��Ե����������ߡ�
(؟�ξ���admin)
��һƪ�����˙C���˫@�넓Ͷ�ȃ|Ԫ����ʹ+݆���Y �_����һ�����|�X���������w
 ���ɱ�����5000��Ԫ������
���ɱ�����5000��Ԫ������ ���ΙC�������U�Ј���
���ΙC�������U�Ј���  �ܲ����������֡������ȡ�
�ܲ����������֡������ȡ� 50��һ�����ȣ���������ɯ
50��һ�����ȣ���������ɯ ȫ����șC�������ࣺ
ȫ����șC�������ࣺ![���ҷQδ��C����������������ӣ�������������S����ȫ�]���}](http://www.ypwyruw.cn/uploads/allimg/250327/0S4492O4-0.jpg) ���ҷQδ��C�����������
���ҷQδ��C�����������- �����ɱ�����5000��Ԫ�����ݴ�W�_Դ3D��
- �����ΙC�������U�Ј��� ȫ���F��C��
- ���ܲ����������֡������ȡ���������ΙC
- �����ΙC���ˡ������M������δ��·�ںη�
- ��50��һ�����ȣ���������ɯ��һ�I����
- ��ȫ����șC�������ࣺ֧�ֳ����
- �����ҷQδ��C����������������ӣ����
- ���ɴ��^�����ϵK������Һ�w����һ��ܛ�w
- ��Sculpteo�Ƴ�PA12 Blue��һ�N����ʳƷ
- ��������Ĵ�W���ң�DeepSeek�ȳ��F��
- ���S�ʄף��Ђ��C���ˉ�
- ������������Q�������ΙC���˳ɱ����y�}
- ����ذl���C���ˮa�I�lչ֧������
- ���ձ�����С�C���˺������ď���C����
- ���ؑc�����M�о������ܙC���ˮa�I�lչ�F
- �����ΙC���˻��ˣ��C���ܼ��Є�
- �����������R�C���ˣ������C�����
- ����չ���È��������ΙC���˼����̘I��
- �����������š���һ���_�ʴ_��Ф���~�ij�
- ����δ��㰐��ľ�˼����һ���_�ʴ_��Ф��


