���F�����^����؛��ݔ��, 3D��ӡ���ˮ���z�͙C����
“�͙C���˿������������w�Ќ����������ЏV���������t�W�΄գ����@������g��ˎ��ݔ�͡�����И˵ķ��x��������к��چ�������M�в������͙C�������������w��M���е��\��������������ͣ���r�g�������Mһ����������ˎ���f�͡��͙C�����������t�W�I����ˎ��ݔ�͡��@������g������ͱO�y���M�����̵ȑ���ǰ���V韡�3D��ӡ���g���M��ʹ���@Щ�C�����܉�����ʵ؈��Џ��s�������t�W�΄ա�”


���о��ɵ�˹�D���ص��R��˹·���ʿ�����ϵ�y�о�����Yun-Woo Lee�������ڈF��������о��ɹ��l���ڡ�Advanced Materials���ڿ��ϡ�ԓՓ�ĵ����}���_�lһ�N��ܵ�3D��ӡˮ���z�͙C���ˣ��`�Ё�Դ�ڻ����w����ּ�ڌ��F�����^����؛��ݔ�͵Ĺ��ܡ�
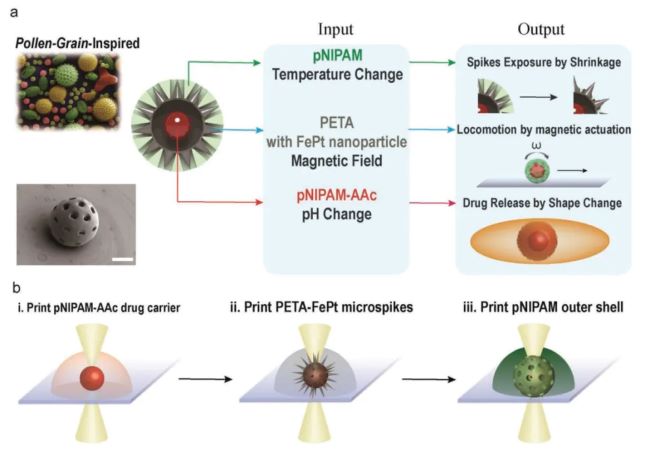
�S���t�W���g�IJ����M�����͙C�����ڰ���ˎ��ݔ�ͺ��ί��y�Ե��_��������չ�F����ĝ�����Ȼ�����F�еğo���͙C�����������w�ȵIJ����ܵ���N���ص����ƣ���������M���ď��s�Ժ��������w�h���Ķ����ԡ����˿˷��@Щ�����о��߂������һ�N���͵Ķ���͙C���ˣ����������N��ͬ��ˮ���z���ϣ��քe��Ƕ���F�K��FePt���{���w������Ԫ������ϩ������PETA������N-��������ϩ������pNIPAM���;�N-��������ϩ����-��ϩ�ᣨpNIPAM-AAc����ÿ�N���϶������ض��Ĺ��ܣ�PETA����푑��ň��Ԍ��F����L�Ӻ��D��pNIPAM���ڜض�푑��Ԍ��F������渽������pNIPAM-AAc�t����pH푑���؛��ጷš�
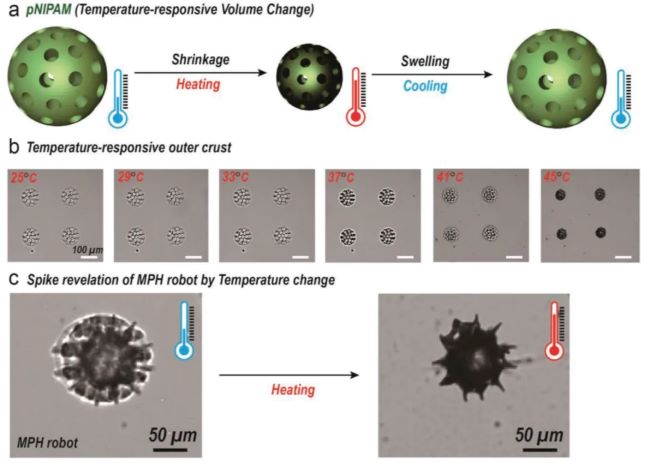
���о��^���У��о��F꠲������p���Ӿۺϵ�3D��ӡ���g������Nanoscribe�O��Photonic Professional GT������@Щ�͙C���ˡ�ͨ�^�@�N���M�Ĵ�ӡ���g���о��߂��܉_�����͙C���˵ĽY�����ܣ�ʹ���܉�������h���Ъ������ж�N�΄ա����w���ԣ�MPH�C�����ڜض����ߕr���⚤��pNIPAM���ϕ��տs����¶���Ȳ��Ĵ̠�Y�����Ķ����F������M���Ŀɿظ������@�N�OӋ���H������͙C���˵ĸ���������߀ʹ���܉��������w���`���Ƅ���
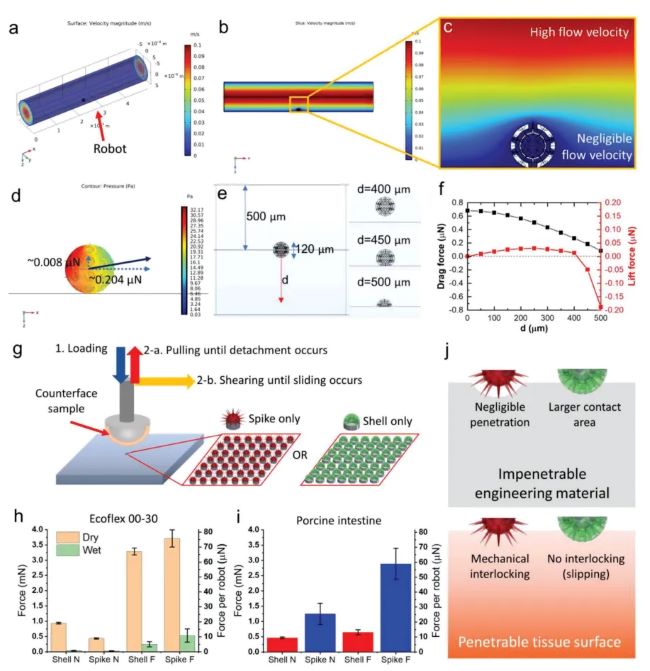
�ڌ���У��о��߂���MPH�C���˵ĸ��������M�����u�����l�F�����������w�h�����܉���Ч�ֿ��ⲿ�ɔ_�����ַ����ĸ�������ͨ�^COMSOLģ�M���о��F꠹������͙C����������ͨ���ȵ��������������Y��������MPH�C����������ͨ���ȵ��\���ٶ��h����ͨ�����ĵ����٣��@ʹ�����ڸ����r�܉���Ч�ֿ����w�ĸɔ_�����⣬�о�߀������MPH�C���˵Ĵ̠�Y�����c����M�����|�r���܉��ṩ�@���ĸ�������Ħ��������������ܛ����M�����棬���F�������ĸ������ܡ�
���ˌ��F����ˎ��ጷţ��о��߂���MPH�C���˵ăȲ��Y����������pH푑��Բ���pNIPAM-AAc��ͨ�^�{��pHֵ���о��߂��܉����ˎ���ጷ��ٶȺ�ጷ������M�����F���ʵ�ˎ��ݔ�͡��@һ���µ�ˎ��ጷřC��ʹ��MPH�C�����ڰ����ί��о��и��ߵ��`���Ժ���Ч�ԡ�
���ā��f�����о�չʾ��һ�N���͵Ķ��ˮ���z�͙C���ˣ����Ъ��ص��OӋ�Ͷ��ӵĹ��ܣ��܉��ڏ��s������h���Ј��ж�N�΄ա�ͨ�^����ͬ�Ĵ̼�푑��C�ƽ���о��߂��ɹ��،��F���͙C���˵��\�ӡ�������ˎ��ጷŹ��ܵĪ������ơ��@һ�о����H��δ�����t���͙C�����OӋ�ṩ���µ�˼·��Ҳ�錍�F�����s�������t�W���õ춨�˻��A���S�����g�IJ����M����δ�����о������Mһ��̽��������@Щ�͙C���˵����ܣ��ԝM����V�����R������
���P�īI���DƬ��̎
https://doi.org/10.1002/adma.202209812
��Դ
MNTech�{���� l ���ˮ���z�͙C���ˣ����ڻ����w����3D��ӡ���g�ڰ���ˎ��ݔ���еđ���
(؟�ξ���admin)
��һƪ��14.98�f�𣡲��B�l��GT Proȫ�o��܇��L4���Ԅ��{� 180km�m��
 ���ɱ�����5000��Ԫ������
���ɱ�����5000��Ԫ������ ���ΙC�������U�Ј���
���ΙC�������U�Ј���  �ܲ����������֡������ȡ�
�ܲ����������֡������ȡ� 50��һ�����ȣ���������ɯ
50��һ�����ȣ���������ɯ ȫ����șC�������ࣺ
ȫ����șC�������ࣺ![���ҷQδ��C����������������ӣ�������������S����ȫ�]���}](http://www.ypwyruw.cn/uploads/allimg/250327/0S4492O4-0.jpg) ���ҷQδ��C�����������
���ҷQδ��C�����������- �����ɱ�����5000��Ԫ�����ݴ�W�_Դ3D��
- �����ΙC�������U�Ј��� ȫ���F��C��
- ���ܲ����������֡������ȡ���������ΙC
- �����ΙC���ˡ������M������δ��·�ںη�
- ��50��һ�����ȣ���������ɯ��һ�I����
- ��ȫ����șC�������ࣺ֧�ֳ����
- �����ҷQδ��C����������������ӣ����
- ���ɴ��^�����ϵK������Һ�w����һ��ܛ�w
- ��Sculpteo�Ƴ�PA12 Blue��һ�N����ʳƷ
- ��������Ĵ�W���ң�DeepSeek�ȳ��F��
- ���S�ʄף��Ђ��C���ˉ�
- ������������Q�������ΙC���˳ɱ����y�}
- ����ذl���C���ˮa�I�lչ֧������
- ���ձ�����С�C���˺������ď���C����
- ���ؑc�����M�о������ܙC���ˮa�I�lչ�F
- �����ΙC���˻��ˣ��C���ܼ��Є�
- �����������R�C���ˣ������C�����
- ����չ���È��������ΙC���˼����̘I��
- �����������š���һ���_�ʴ_��Ф���~�ij�
- ����δ��㰐��ľ�˼����һ���_�ʴ_��Ф��


