�����ׂ�̫�ղɵV�C���ˁ��ˣ����������ƄӽY��
�r�g��2025-03-16 20:23 ��Դ��δ֪ ���ߣ�admin ��x����
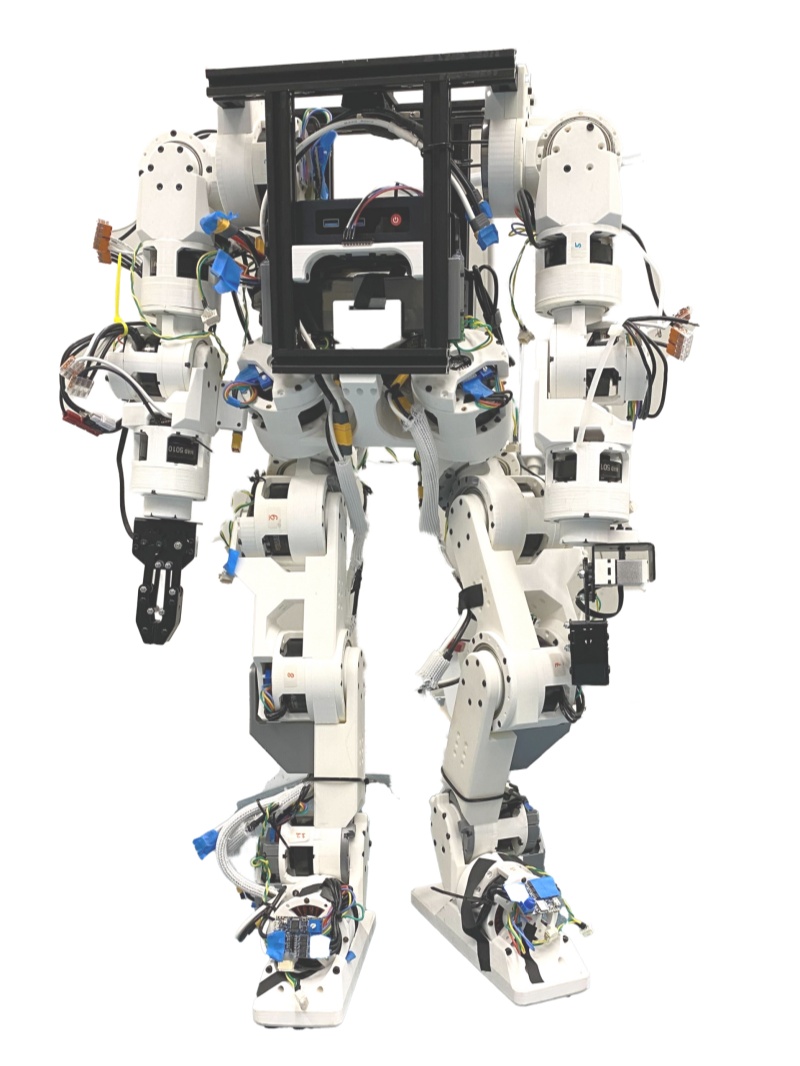
��Ƽ�3��16����Ϣ����������҇����_̫�ղɵV�C�������Ї��V�I��W�Q������־���҇���̫���YԴ�_�l�I��ȡ���ش�ͻ�ơ�
�c�������е����ΙC���˺͙C������ͬ���@��̫�ղɵV�C���˲��ê��ص������OӋ���������݆�������צ�㣬����������w���s�h���µĵ��|��̽�͵V��ɼ��΄ն����졣

�����ׂ�̫�ղɵV�C���ˁ��ˣ����������ƄӽY��
�ڵ����ϣ��@̽���I������������ʹ�@�^����ر���Ȼ�������������H����������֮һ��С���Ǹ���̎�������h�������y���@̽��ʽ�y����Ч�����˽�Q�@һ�y�}�����ЈFꠏ���Ȼ�缳ȡ�`�У�ģ�M���xצ�̽Y������C�����OӋ�������צ���㣬��Ч�˷���ʧ�حh���µ�Ư�Ɔ��}���_���@�^�܉��@�M���w���档
���ˑ�����������̫�ղɵV�C����߀�����˷��������ƄӽY������ĩ�����܇݆���^�̽Y���ɷN���ã�ʹ���܉��`���m��С���ǿ��ݲ�ƽ�ĵر��h����Ŀǰ��ԓ�C����ԭ�͙C����Ո������ͨ�^������

�����ׂ�̫�ղɵV�C���ˁ��ˣ����������ƄӽY��
���^��ɳ�P�ϵķ���Ӗ����̫�ղɵV�C�������܉�ͨ�^������ϵ�y�Ҽܡ��x�����ȅfͬ���������������h���{�������Y���Π�ԑ����������w���s��׃�ĵر��h����
�����Mһ��������̽������̫�ղɵV�C���ˌ����Ї��V�I��W��ع������ܽ����c�����\�Sȫ�����c������M��“�M�AӖ��”��ԓ������܉�ģ�M�������O�˭h������C�����ṩ���ӽ������Ӗ���l����
��20���o50���ĩ�ԁ���ȫ���ѳɹ��l��80��������̽�y�����d���w�����e�����S��������̽�y������Ŀǰ���Ї������������_˹�ȇ������ƶ��d�˵���Ӌ���������YԴ�����ɞ���������_�l���õ�̫���YԴ�����⣬̫�ϵ�Д��������С����Ҳ�N�����S���ĵV�a�YԴ�����н���С��������܉�����x�����^���������^�ߵ��_�Ƀrֵ�Ϳɲ��ԣ�Ŀǰ�Ѱl�F1500���w�����_�l�����Ľ���С���ǡ�
�Ї����_̫�ղɵV�C���˵Ć��������҇����c̫���YԴ�_�l�춨�ˈԌ����A�������S�����g�IJ����M���͑��õIJ������룬̫�ղɵV�C���ˌ���δ��̫���YԴ�_�l�аl�]��Ҫ���ã������̽�����桢����̫���YԴؕ�I������

�����ׂ�̫�ղɵV�C���ˁ��ˣ����������ƄӽY��
�����ĽY������̎����Ƽ�
(؟�ξ���admin)
 ���ɱ�����5000��Ԫ������
���ɱ�����5000��Ԫ������ ���ΙC�������U�Ј���
���ΙC�������U�Ј���  �ܲ����������֡������ȡ�
�ܲ����������֡������ȡ� 50��һ�����ȣ���������ɯ
50��һ�����ȣ���������ɯ ȫ����șC�������ࣺ
ȫ����șC�������ࣺ![���ҷQδ��C����������������ӣ�������������S����ȫ�]���}](http://www.ypwyruw.cn/uploads/allimg/250327/0S4492O4-0.jpg) ���ҷQδ��C�����������
���ҷQδ��C�����������������
- �����ɱ�����5000��Ԫ�����ݴ�W�_Դ3D��
- �����ΙC�������U�Ј��� ȫ���F��C��
- ���ܲ����������֡������ȡ���������ΙC
- �����ΙC���ˡ������M������δ��·�ںη�
- ��50��һ�����ȣ���������ɯ��һ�I����
- ��ȫ����șC�������ࣺ֧�ֳ����
- �����ҷQδ��C����������������ӣ����
- ���ɴ��^�����ϵK������Һ�w����һ��ܛ�w
- ��Sculpteo�Ƴ�PA12 Blue��һ�N����ʳƷ
- ��������Ĵ�W���ң�DeepSeek�ȳ��F��
���]����
���c����
- ���S�ʄף��Ђ��C���ˉ�
- ������������Q�������ΙC���˳ɱ����y�}
- ����ذl���C���ˮa�I�lչ֧������
- ���ձ�����С�C���˺������ď���C����
- ���ؑc�����M�о������ܙC���ˮa�I�lչ�F
- �����ΙC���˻��ˣ��C���ܼ��Є�
- �����������R�C���ˣ������C�����
- ����չ���È��������ΙC���˼����̘I��
- �����������š���һ���_�ʴ_��Ф���~�ij�
- ����δ��㰐��ľ�˼����һ���_�ʴ_��Ф��


