���̎�ģ�����~�|��3D��ӡ��ܛ�w�C���ˆ�����
���գ��������Π���W��Cornell University���ԙCе�ͺ��պ�����������Rob Shepherd����һ֧�о��Fꠣ���������l����һƪՓ��������������ģ�����~�|�ֵļ������ԣ��ɹ���3D��ӡ����һ���|�ְ��������ֵ��ע����ǣ��ƌW�҂����@��о���ʹ�õ��P�I�O��ֻ��һ�_���ƵĹ�̻�3D��ӡ�C���Լ����Ј����N�۵������w��֬��

�о��ˆT���J�飬�@һ���¾����_�������x����������ֹ�����c�����Ե��m���M��߀�����ڣ����ɶ�������ζ���������ܡ���������Π���W���@Ⱥ�ƌW�҂��ڡ�Bioinspiration & Biomimetics���ϰl����Փ�������Q���@�N�µ�3D��ӡ�����_����һϵ���µĿ����ԡ��@��о��õ���������܊�ƌW�о��k���ҡ�3M��˾���������ҿƌW�������NSF�����Y����
��Shepherd������B�f�������Ĝyԇ�������@�N���۵�3D��ӡ���Ͻ^���ǙC���˹��̎���һ�������x�����������е���C�����@�N�����Mһ�����M�Ŀ����ԣ������f�@�N�Á�����ܛ���������d����ӡ��ˇ�����dz��m�ڴ�����s�ķ���ϵ�y�������f���z�����ǣ���ǰ���������g���������������s�Y�������������еIJ���ԭ��Ҳ�c�������P��
�о��ˆT����KĿ���nj������ЙC�w����Ȼ������ֲ���C����������������Ȼ���У������Є���������~�ǘ�����ؑ������N���s�ĭh������ͨ�^ģ�������w�����ԣ�һЩ��׃�εIJ�����Һ�w�����z�͏����w���܉���׃�C���c�h��������÷�ʽ����������Ȼ�Ć��l��֮ǰ�����ܛ�C��������ģ�����~ͨ�^С���ѿp��ģ������ڲ�ƽ̹�ĵ������\�������⣬�@Щ����ƽ�_߀���еͳɱ����������������������c�S��Nľۺ������Ƶ����c�����о��ˆT����������Փ�ϣ��@�N���Բ��ϵ��ɳ��m׃������ʹ���@Щܛ�C����ϵ�y�܉�����������κεط��ƄӺ͏�������

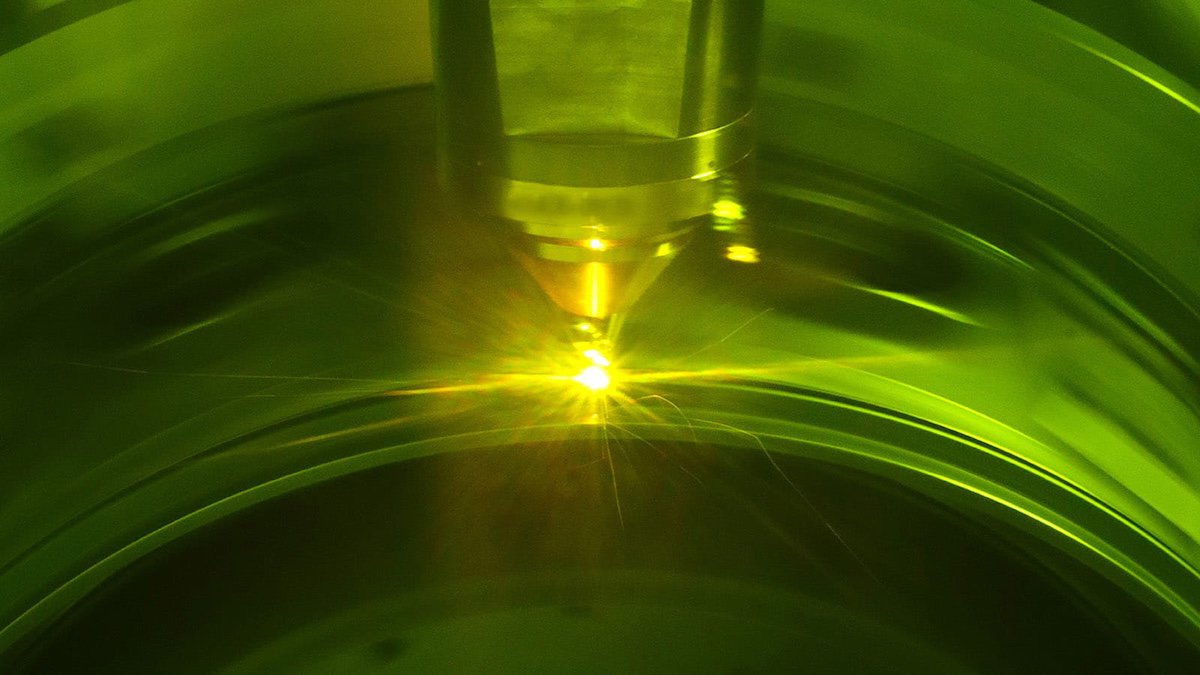
�����~�|�ֵ�������Ҫ��������Ȳ������������ֱ�ļ������������������Ҫ���F��ˏ��s��ϵ�yΨһ���еķ�������ʹ��3D��ӡ���¶��ϵؽM�b�@Щ������ͨ�^ʹ��3D��ӡ���g��ӡ���Բ��ϣ�ܛ�C���˵��OӋ���g������������������f����������̎���������һ�_�ɱ�����1500��Ԫ�Ĺ�̻�3D��ӡ�C��ԓ�C��������һ�N���¶��ϵĔ�����ģͶӰ3D��ӡ��dmp-sl�����g����ʹ���������R�������M�й�ۺ����Y���C�����@�_�C�������úܺ��������ܛ��ʹ�õ���Envision��˾��Creation Workshop������ӡ����ͬ���Ǐ��Ј���ُ�I��Elastomeric Precursor��EP��Spot-E resin��Spot-A Materials��˾����

�ƌW�҂�����K�ĽY��ʮ�֝M�⡣�����f�����҂��ѽ��_�l���܉�ģ�M������~�|���ǘӾ��м������w�o�����ܣ����ǙC�����ijɌ����������������@Щ��ӈ��������\����������ƻ�ļ���M���ĺÎױ�����������Փ���Ќ��������Π��ĈF��J�飬�@Щԭ�t���ԑ�����3D��ӡ�����������s����Y���Ć�һ���w���Ķ������V���ĝ��ڑ��á����@���M�Ͽ����ڄ���������s����ϵ�y�������@һϵ�y����ʹ��3D��ӡ���g����һ����һ�����wһ���Դ�ӡ�������������OӋ���ɣ��@Щ�b�õ�����Կ���һЩ����M����ԓDMP-SL 3D��ӡϵ�y��Ψһ�m�����_�l�܉�ģ������ϵ�y���c֮���ӵ�ܛ�C���˵ļ��g���������f��
������ҕ�l��B����ҿ��Կ�����
(؟�ξ���admin)
 Vertico�Ƴ��ɳ��mģ�K��3
Vertico�Ƴ��ɳ��mģ�K��3 ����ɣ�Ǵ�W�аl3D��ӡ��
����ɣ�Ǵ�W�аl3D��ӡ�� ���Ȳ�ͬ��Դ�ljK��ֲ�
���Ȳ�ͬ��Դ�ljK��ֲ� ��؛���ڡ��������M���p��
��؛���ڡ��������M���p�� ���������x���\���b�䣺Ca
���������x���\���b�䣺Ca ����CoAspire�cDivergent
����CoAspire�cDivergent- ��Vertico�Ƴ��ɳ��mģ�K��3D��ӡ����DIA
- ������ɣ�Ǵ�W�аl3D��ӡ�ɴ����O�䣺ͨ
- �����Ȳ�ͬ��Դ�ljK��ֲ�3D��ӡ������
- ����؛���ڡ��������M���p�룬��⁺Ͻ�3D
- �����������x���\���b�䣺Carbon�cReusch
- ������CoAspire�cDivergent��˾���аl3
- ��ChristianaCare 3D��ӡ���������ί�Ƥ
- ��Alquist 3D����3D��ӡ���g��Ч����֠�
- ��CoAspire��Divergent���g��˾���F3D��
- ��VICIS��Carbon�Ƴ�NFL피�3D��ӡ�^��
 �ջݹ�˾�Ƴ��µ�
�ջݹ�˾�Ƴ��µ� �ÿ��_˹������
�ÿ��_˹������ ��܊���M�h��3D��
��܊���M�h��3D��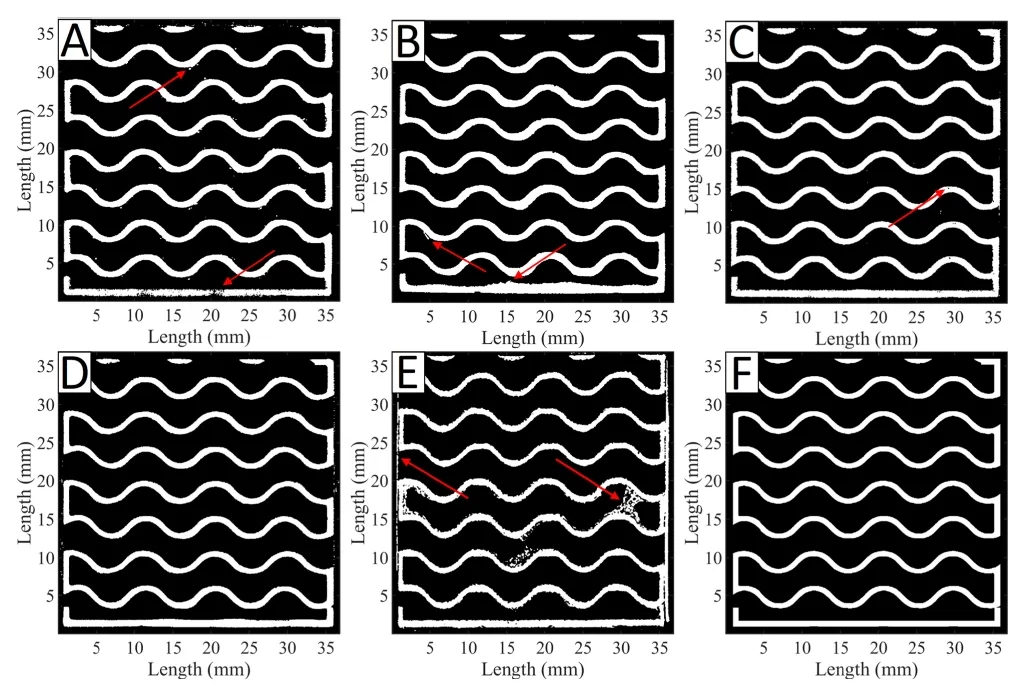 3D��ӡ�ğύ�Q��
3D��ӡ�ğύ�Q�� 3D��ӡ���F��̶�
3D��ӡ���F��̶� �炐�ȁ���W����
�炐�ȁ���W����- ��3D��ӡ��������3D��ӡ�P���������ij���
- ����3D��ӡ�C�����b���ˣ�����3d��ӡ��һ
- ���ƌW���_�l��3D��ӡ���ԡ������족늳�
- ��600mm��ߴ�SLS 3D��ӡ�C��o�˾�܇܇
- ��Curiteva���Q3D��ӡ��С��PEEK�g�P
- ���Լ�������һ�_ֻ��20��Ԫ��3D��ӡ��
- ���ձ�����ȫ������3D��ӡ��܇վ
- ���P�c3D��ӡ���ޏ�������E�еĽ��䰸��
- ���֙C��ע���ˣ��Ø�ݮ��+3D��ӡ�C����
- ���D�⣺3D��ӡ�������a����


